摘要:提出了基于电力线载波通信的诱导风机控制系统设计方案,并给出了基于ARM7的控制器电路图,包括电力线载波通信、CO检测、烟雾检测、时钟、存储等模块电路;讨论了主/从通信过程、风机控制流程及详细的软件设计流程。该设计方案与传统的总线式智能通风控制系统相比,具有系统构建简单、成本低、调试维护方便的优点。
关键词:电力线通信;诱导通风;LPC220O;烟雾检测;C0检测;PL2102
引言
诱导通风是采用诱导风机喷射出高速气体,诱导和带动周围气体向前运动,从而达到空气流通和换气的目的。目前,多采用智能型控制系统,布线复杂,成本高,系统调试及维护不便。电力线载波通信具有成本低、调试维护方便的优点,非常适用于诱导通风控制系统。
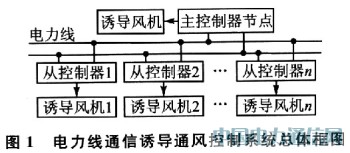
1 电力线通信诱导通风控制系统总体设计
电力线通信诱导通风控制系统总体框图如图1所示,系统由多个诱导风机控制器组成,控制器之间采用电力线通信,每个控制器都具有检测周边空气质量状况(烟雾检测、CO检测)的功能,并能够根据检测结果控制一台诱导风机工作。控制器分主/从控制器,主控制器在完成本身所带诱导风机控制的同时,要获取各从控制节点工作状态,并控制从控制器工作。从控制控制器根据检测结果控制自身所带诱导风机工作,同时向主控制器汇报当前工作状态并受到主控制器控制,当自身控制与主控制器控制命令发生冲突时,以主控制器控制命令为准,例如自身需要开启风机,而控制命令需要关闭风机,则控制关闭风机。
2 电力线通信诱导通风控制器硬件设计
2.1 诱导通风控制器硬件结构框图
电力线通信诱导控制器硬件结构分为烟雾检测、CO检测、电力线载波通信、诱导风机控制、电源单元、时钟单元、存储单元、看门狗复位及键盘显示等功能单元,如图2所示。键盘主要进行系统控制参数(如CO浓度阈值、主/从节点标识、风机起/停延时等)设定及时钟校准,显示单元可以指示用户参数设定过程,并显示系统当前状态,便于系统的安装调试及维护。参数设定后,将参数写入存储器中,控制器开始进行烟雾检测、CO检测、诱导风机控制等工作;主控制器需要定时查询各从控制器工作状态,并控制从控制器工作。
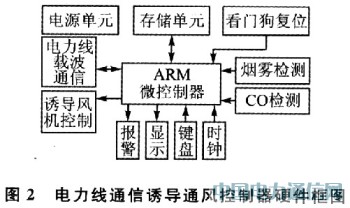
由于诱导通风控制系统工作环境(如车库)内供氧不充分,如果发现火灾,在火灾初期为阴燃状态,若此时开启诱导风机,会助燃为明火,因此控制器有必要进行烟雾检测(检测阴燃状态),避免诱导风机误动作造成重大损失,在检测到火灾险情时发出声光报警,并停止所有风机。C0检测用于衡定区域内空气质量状况,检测到CO超标时开启诱导风机工作,保证通风换气效果。控制器通过电力线载波通信单元实现与其他控制器的数据传输和信息交互。由于控制器工作环境复杂、工作过程无人值守,看门狗复位单元可以有效避免系统工作过程中发生死机和程序跑飞现象。
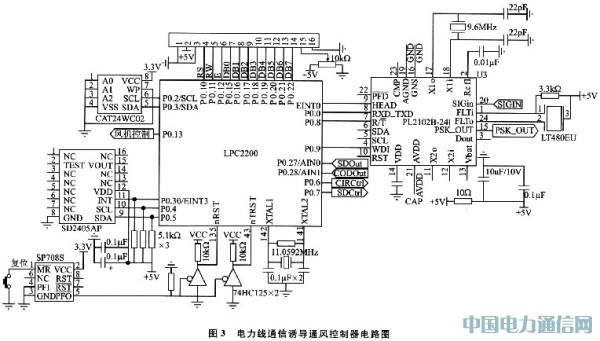
2.2 诱导通风控制器硬件电路图
诱导通风控制处理器采用32位ARM微控制器LPC2200,该处理器基于ARM7TDMI-S体系结构,处理器时钟频率高达60 MHz,片内集成高速Fl-ash存储器及丰富的外设部件(如外部中断、A/D转换、LCD控制器等);处理器自带的10位A/D转换,可以保证C0检测、烟雾检测中数据采集的需要;处理器自带看门狗寄存器,在运行中如果没有周期性的重装,寄存器溢出时将产生内部复位。时钟单元采用时钟芯片SD2405AP,该芯片内置晶振、充电电池、具有标准I2C接口,可方便地挂接在LPC2200的I2C接口上,芯片内部具有年、月、日、时、分、秒寄存器,可以满足诱导风机定时、延时启/停控制、CO及烟雾的定时检测要求,电力线通信诱导通风控制器电路图如图3所示。其中CAT24WC02是串行EEPRO-M,SP708S是微处理器监控器件。