ժҪ����Ҫ�������������ߴ�������ʱ��ͬ���㷨�ķ�չ�����Ӱ�����ߴ�������ʱ��ͬ�������غ��ص������Ŀǰ���ֱȽϵ��͵�ʱ��ͬ���㷨�������侫�ȡ������Լ����Ե���ȱ������˽���ϸ�ķ��������ض��������У�Ӧ�öԾ����빦�Ľ������п��ǡ����̽����δ�����ܵķ�չ����
����
���ֽڵ�֮��ʱ���ϵ�ͬ�������ߴ����������зdz���Ҫ�����DZ�֤���ݿɿ������ǰ�ᡣNTPЭ����Ŀǰ�������ϲ��õ�ʱ��ͬ��Э��������Ĵ������ߴ��䣬���ʺ����ڹ��ġ��ɱ������Ƶ����ߴ��������С�GPSϵͳҲ�����ṩ�߾��ȵ�ʱ��ͬ�����������źŴ��ԲGPS���߱��밲װ�ڿտ��ĵط�������Ҳ�ϴ����Բ��ʺ����ߴ������硣
Elson����2002���״�������ߴ���������ʱ��ͬ�����о����������������൱��ĵ���ʱ��ͬ���㷨����Ҫ���Է�Ϊ���¼��ࣺ���ڷ�����һ�����ߵ�˫��ͬ���㷨�������㷨��TPSN(Timing-Sync Protocol for Sensor Networks)�㷨�����ڷ�����һ�����ߵĵ���ʱ��ͬ���㣬�����㷨��FTSP(Flooding Time Synclaronization Protocol)�㷨��DMTS(Delay Measurement Time Synchronization)�㷨�����ڽ�����һ�����ߵ�ͬ���㷨�������㷨��RBS(Reference Broadcast Synchronization)�㷨��
�������������ϼ��ֵ���ͬ���㷨������������˷ִ�ʽ�IJ�������˽ṹ�㷨���Լ�����������������������������ܣ���LTS(Li-glatweight time synchronization)�㷨��CHTS(Cluster-based Hierarehical Time Synchronization)�㷨��CRIT(Chained-Ripple Time Synchronization)�㷨��PBS(The Pairwise Broadcast Synchronization)�㷨��HRTS(Hierarchy ReferencingTime Synchronization Pro-toc01)�㷨��BTS(Broadcasttime synchronization)�㷨��ETSP(Energy-efficient Time Synchronization Protocol)�㷨�ȡ�
Ȼ������������ͬ���㷨������չ�����������ߣ��������繦���������ͣ����ǻ��ڵ���ʱ��ͬ�����ơ��������ߴ�������������뷢չ�����нڵ����������С�����������С�����������ģ���ͬ�������ۻ�����ؽ�Խ��Խ���أ�ĿǰҲ�бȽ��µ�ͬ���㷨����ͼ�����ܿ������ۼ��������Щ���⣬��Э��ͬ����
1 ʱ��ͬ��
1.1 ʱ��ͬ����ȷ���Ե�Ӱ������
ʱ��ͬ����ȷ���Ե���Ҫ��Ӱ��������ͼ1��ʾ��
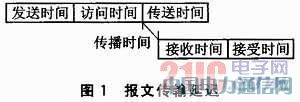
����ʱ�䣺���ͷ����ڹ�����鲢������ת�������ͷ���MAC���ʱ�䡣��Ҫȡ����ʱ��ͬ������IJ���ϵͳ����ʱ��ʹ��������صȡ�
����ʱ�䣺���鵽��MAC���ȡ�ŵ�����Ȩ��ʱ�䡣��Ҫȡ���ڹ����ŵ��ľ�������ǰ�ĸ��صȡ�
����ʱ�䣺���ͷ����ʱ�䣬��Ҫȡ���ڱ��ĵij��ȵȡ�
����ʱ�䣺�����뿪���ͷ��������鴫�䵽���շ�֮������ߴ���ʱ�䡣��Ҫȡ���ڴ�����ʡ��������ȡ�
����ʱ�䣺���ն˽��յ����飬�������鴫�͵�MAC�������ʱ�䡣����ʱ�䣺�������յ������ʱ�䡣��Ҫ�ܵ�����ϵͳ��Ӱ�졣
1.2 ����ʱ��ͬ���㷨����
1.2.1 TPSN�㷨����
TPSN�㷨���õ��Dz���͵�����ṹ���ǻ��ڷ�����һ�����ߵ�˫��ͬ���㷨���ֳ������Σ���һ��Ϊ��η��ֽΣ��ڶ���Ϊͬ���Ρ�T1��T4������¼ͬ���ڵ�ı���ʱ�䣬T2��T3������¼�ο��ڵ�ı���ʱ�ʡ�ͬ���ڵ�A��T1ʱ����ο��ڵ�B����һ��ͬ�������ģ������а�����ͬ���ڵ�ļ����T1�����ο��ڵ�B�յ����ĺ�¼�½���ʱ��T2����������ͬ���ڵ�A�ظ�һ��ͬ��Ӧ���ģ��ñ����а����˲ο��ڵ�B�ļ����T1��T2���ظ�ʱ��T3��ͬ���ڵ�A�յ��ο��ڵ�Ļظ�����ʱ��T4���������ر��ĵĴ����ӳ���ͬ��Ϊd����mΪͬ���ڵ���T1ʱ������֮���ʱƫ����������ʱƫ��ͬ����T2=T1+m+d��T4=T3-m+d�ɵõ���

����T4ʱ�̣�����ͬ���ڵ�A�ı���ʱ������������m�����ܴﵽͬ���ڵ�A��ο��ڵ�B֮���ͬ����
1.2.2 RBS�㷨����
RBS�㷨�ǻ��ڽ�����һ�����ߵ�ͬ���㷨�����Ȳο��ڵ�㲥һ���ο����飬��ͬ���ڵ�A�յ�������飬�����Լ��ı���ʱ��ΪT21����ͬ���ڵ�B�յ��������ʱ��Ҳ�����Լ��ı���ʱ��ΪT22��Ȼ��ͬ���ڵ�A��ͬ���ڵ�B��������ʱ��T21��T22����ʱ����һ���ڵ�ֻҪ����ʱ���ֵm=T21-T22�����Լ���ʱ�Ӿ��ܴﵽ����һ���ڵ�֮���ͬ�����ڶ��������У�RBS�㷨���ö�ι㲥ͬ����Ϣ�����սڵ���ݽ��յ�ͬ����Ϣ��ƽ��ֵ��ͬʱ������Сƽ�����Իع鷽��������������Լ�Сͬ����
1.2.3 DMTS�㷨����
DMTS�㷨�ǻ��ڷ�����һ�����ߵĵ���ʱ��ͬ���㷨�������ͽڵ��ڼ�ͨ������ʱ�����㲥�������ʱ���t0���Ӷ��ų��˷��ͽڵ�Ĵ����ӳ���MAC��ķ����ӳ١������跢�ͱ��ĵij���ΪNA������(����ǰ������ͬ����)������ÿ�����ص�ʱ��Ϊt�����������ڽ�����ͬ���ֺ�¼�´�ʱ�ı���ʱ��Ϊt1�����ڵ����Լ��ı���ʱ���¼֮ǰ��¼�´�ʱ��ʱ��t2����ʱ���սڵ�Ϊ���뷢�ͽڵ�ﵽʱ���ϵ�ͬ�������Ե������սڵ��ʱ���Ϊt0+t·NA+(t2-t1)��
�Ӳο������У����Կ��������������ڼ��ݴ�ѧ��������У��Mica�ڵ��ϲ��Թ���TPSNƽ���������Ϊ17.61μs��DMTSƽ���������Ϊ30μs��RBSƽ���������Ϊ6.29μs��TPSNƽ��4�����Ϊ21.43μs��DMTSƽ���������Ϊ151μs��RBSƽ��4�����Ϊ9.97μS��
1.2.4 �����㷨����
LTSЭ���ǻ��ڷ��͡�����ͬ�����Ʒ�չ����������˼���ʽ�ͷֲ�ʽLTS����ʱ��ͬ���㷨��LTSЭ�����Ȱ�������ɹ���������������˽ṹ������������ÿ���߽��е����ɶ�ͬ�����ο��ڵ���ӽڵ�ͬ����ɺ����Ըýڵ�Ϊ�ο��ڵ㣬����ͬ����ʽ����ͬ����ȥ��ֱ��ͬ����ɡ�
�����ɶ�ͬ������TPSNͬ���������ɶ�ͬ���Ĵ����DZ��������Ժ�����Hui Dui�����������HRTS�����˹㲥�����ԣ�ֻ��Ҫһ��ͬ�����̿������һ�������������нڵ��ͬ������һ��������LTSЭ��Ĺ��ġ�HRTS�㷨���ٲ��ù�������������ıߣ����õ��ǹ��������������Ҷ�ӽڵ���������Ժ����������LTSЭ�飬HRTS�㷨������һ���ľ�ȷ����������������Ĺ��ġ�
BTSͬ������������HRTS�㷨��Ҳ���Ƚ���������ȳ��������˽ṹ��ֻ����BTS���õ���ʱ��ת���������Դﵽ���������ʱ��ͬ������HRTSֱ�Ӷ�ͬ���ڵ�ı���ʱ������ģ��õ�ȫ����ͬ����ͬ�����ĸ�����ΪHRTSЭ���2/3��
PBSͬ���㷨��˼���Dzο��ڵ�����ڵ�֮�����˫��ͬ����������TPSN���ƣ������ڵ�(�������ڵ��ͨ�ŷ�Χ��)����������ͬ����Ϣ���Ϳ��Ը��ݽ�����һ������ͬ������ͬ����������RBSͬ����PBSͬ����ǰ����ÿ��ͬ���ڵ�����ڴ��ڵ��ͨ�ŷ�Χ֮�ڡ�
ETSP�㷨��Ҫ���õ��������ż�ֵN��ѡ��ͬ���㷨�������ڵ���ӽڵ�С�ڻ����Nʱ�����ý���-����(RBS)ͬ��ģʽ��������÷���-����(TPSN)ͬ��ģʽ��Nֵ��ѡ����� �����㣬ʽ��m=Rx/Tx��RxΪ�ڵ�Ľ��մ�����TxΪ����������
�����㣬ʽ��m=Rx/Tx��RxΪ�ڵ�Ľ��մ�����TxΪ����������
FTSPͬ���㷨���ȸߵ�ԭ���ǣ��������ڷ���һ��ͬ��������ʱ��������˶��ʱ����������߿��Ը����⼸���ж�ʱ����������ȷ��ʱ��ƫ�
1.2.5 Э��ͬ������
����ͬ�����ƣ����������Ľ����ǻ��ڵ���ͬ�����ƣ�������������Э��ͬ�����������ٵ����شӵ���ͬ�������Ͻ��иĽ�������ͨ���źŵ���ԭ����ʹͬ�����ڵ��ܹ���ͬ����Ϣֱ�ӷ��͵�Զ����ͬ���Ľڵ㣬ʹԶ���ڵ�ֱ������ڵ�ͬ����������ͬ�������ۼӵĽ����Hu A������Խڵ��ܶȽϸߵ����������һ��Э��ͬ���㷨������˼���Dzο��ڵ����ͬ�����ڷ���m��ͬ�����壬��һ���ھӽڵ��յ������Ϣ�������������������m������ķ���ʱ�̼�����ο��ڵ�ĵ�m+1��ͬ����Ϣ������ʱ�䣬���ڼ��������ʱ��ͬ����ο��ڵ�ͬʱ���͵�m+1��ͬ����Ϣ�������źŵ��ӣ����ͬ��������Է��͵���Զ�Ľڵ㣬��Ȼǰ���������нڵ��ܶȽϸߵ������A.Kr-ohn���������������������ʵ��Э��ͬ����ֻ��Ҫ������Ϣ�������˶������Ϣͬ�������������ο�����֤ʵ��Э��ͬ�����ķ�����ڵ��ܶȳʷ��ȹ�ϵ����˽ڵ��ܶ�Խ��ͬ�����Ҳ��ԽС��
2 ʱ��ͬ���㷨��������Ƚ�
���ݽڵ���Ϣ������̿��Եõ�ʽ(1)��ʽ(2)��
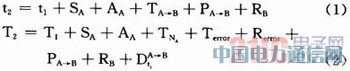
��ʽ(1)��(2)�У�t1��t2���ɱ�ʱ����ȷ���ģ���ʾUTCʱ�䡣T1��T2�ֱ���t1��t2����Ӧ�ı��ؽڵ�������ı���ʱ�䡣SA�����ڵ�A�ı��ķ���ʱ�ʣ�AA�Ƿ��ͱ��ĵķ���ʱ�䣬TA→B��A�ڵ㰴���ش��䱨����B�ڵ㰴���ؽ��ձ�������Ҫ��ʱ�䣬PA→B�ǽڵ�A�������ڵ�B��ʱ�䡣RB�ǽڵ�B�ı��Ľ��մ�������ʱ�䡣TN�Ǵ���NA�����ص���ʱ�䡣Terrorָ������ص���Rerror��ʱ����̴��ڵ��� �����ڵ�A��ڵ�B��t1ʱ�̵�ʱƫ��
�����ڵ�A��ڵ�B��t1ʱ�̵�ʱƫ��
����TPSN�㷨����Ϊ��MAC�����˼�ʱ�����������������˷���ʱ�������ʱ�������Ӱ�졣��˶�TPSN�㷨ʽ(1)��(2)�Ϳ��Լ�дΪʽ(3)��(4)��


����DMTS�㷨�����ͽڵ�A��T0ʱ�̼����У����սڵ�B�ڱ��ĵ���ʱ�̸����ļ���ʱ���T1�����ڵ����Լ��ı���ʱ���¼֮ǰ��¼�´�ʱ��ʱ��ΪT2����T3ʱ����ɵ���������Եõ���

��ʽ(7)�п��Կ�����TPSNͬ�����ȸߵ�ԭ������MAC����ô�ʱ�귽ʽ�����˷���ʱ�������ʱ���Ӱ�죬������Ϣ˫����ʱ�����˴���ʱ���Ӱ�졣ȱ���ǵ㵽��֮���ͬ����ÿ��ֻ��һ�Խڵ����ʱ��ͬ����ͬ��һ����Ҫ����2����Ϣ������2����Ϣ�����Ľϴ�ʽ(10)���Կ���DMTSͬ�����ϴ��ԭ���ǵ���������û�취����Terror��Rerror��Ӱ�죬��DMTSͬ��һ��ֻҪ����1��������Ϣ��1��������Ϣ�����Ľϵ͡�����FTSPͬ���㷨��DMTS�ߵ�ԭ���ǣ��������ڷ���һ��ͬ��������ʱ��������˶��ʱ����������߿��Ը����⼸���ж�ʱ�䣬���������ȷ��ʱ��ƫ����Կ�����RBS��ȫ�����˷��ͷ���Ӱ�죬ֻ��ͬ��һ������3��������Ϣ��4��������Ϣ�����Ľϴ�����HRTS��PBS�㷨���������������㷨�����ں����ã��ڴ��ڵ��������ڵ�ѡ�������˽ϴ�ĸĽ����Խ�����������Ĺ��ġ�
3 �ܽ���չ��
������ͬ���㷨���������ȶ��п��Կ�����ÿ���㷨���и��Ե���ȱ�㣬���ʺϲ�ͬ�����ߴ������硣���ȸߣ���Թ���Ҳ�ϴ��ض������ߴ������磬ѡ��ͬ���㷨ʱӦ�����п��Ǿ����빦�ġ��������Ͽ����������й�ʱ��ͬ���㷨���о����ֶ��ǻ����������͵ĵ���ͬ���㷨ԭ������һ�������������п�������빦�ģ�����������������ִ�·���㷨�ȣ���ƽ����������Ĺ��ģ����ͽڵ㴫������������ͬ���ľ��ȡ�Э��ͬ���㷨�����������������Ŀ���չ���뽡׳�ԣ���Ҫ��ڵ������ͬ��ͬ�����壬�Ƚ����ѣ�Ŀǰ����Ҫ��һ���ķ�չ��֤��Ҳ��δ�����ܺܺõķ�չ����