随着国防技术的飞速发展,要求导弹等经常工作在高动态环境下武器的性能不断改进。传统的导弹制导手段不能满足现代战争对导弹提出的高精度、高可靠性和具有强大战场生存能力的要求。例如传统的导弹制导系统大都采用惯导系统,由于不断提高的改进陀螺仪和加速度计的要求很难得到满足,惯导系统定位误差随时间积累的缺点越来越限制其进一步应用。目前,纯惯导系统虽能初步满足中近程导弹飞行的点与点之间导航精度要求,但不能满足远程、长时间航行及武器投掷、侦察、变轨控制等更高精度的制导要求。因此,很有必要研究新的制导手段来满足现代战争的需要。随着GPS这一全球卫星定位系统的发展,特别是由于该系统具有全球性、全天候、连续的精密三维导航与定位能力以及良好的抗干扰性和保密性,该系统被迅速应用于军事领域的各个方面,并已取得了可观的军事效益。本课题正是在这种背景下,研究GPS这一全新的全球定位系统在导弹制导中的应用,有重要的军事价值和现实意义。
1 导弹飞行环境(高动态环境)给接收GPS信号带来的问题及解决方案
导弹制导的显著特点是在高动态环境中实施轨迹导引和误差校正。研究GPS在制导中的应用必须研究高动态环境给接收GPS信号带来的影响。虽然GPS系统具有比以往导航定位系统无法比拟的许多优点,但是与静态、中低动态环境相比,高动态环境使GPS信号产生了较大的多普勒频移,给接收机可靠捕获和跟踪信号带来了较大的困难。普通GPS接收机在没有惯导系统速率辅助的条件下很难在高动态环境下可靠地工作。
1.1 高动态环境给接收GPS信号带来的问题
与中、低动态环境相比,高动态环境给接收GPS信号带来了如下问题:
①高动态使GPS载波信号产生较大的多普勒频移,若使普通接收机的载波锁相环PLL(常用costas环)能够保持锁定,就必须增加环路滤波器的带宽。这样就会使宽带噪声窜入,当噪声电平增大到超过环路门限时就会致使载波跟踪环失锁。而载波跟踪提供精确的距离变化率测量导航解,这样就会丢失距离和距离变化率的估计值;若不增加载波锁相环的环路带宽,则载波多普勒频移常常会超过锁相环的捕获带,这样也不能保证对载波的可靠捕获和跟踪。
②高动态也使得GPS信号的副载波,即伪随机码产生动态时延,使得普通接收机的DLL码延时跟踪环容易失锁,而且重新捕获时间很长,往往使导航解发散。
③载波跟踪失锁也使50Hz的调制数据无法恢复,相应的卫星星历无法获取。
普通的GPS接收机大都采用载波锁相环进行载波跟踪、码延迟锁定环进行码跟踪,如果没有惯性导航系统的速率辅助(即提供有关多普勒频移的先验知识),是很难在高动态环境下可靠工作的。
1.2 解决高动态环境所带来问题的典型方法
解决高动态环境所带来的问题,主要是研究如何提高在高动态环境中对多普勒频移的了解程度。研究表明,多普勒频移一般可通过某些算法进行多普勒频移估计而掌握,或者通过惯性导航系统来提取。
1.2.1 高动态环境中多普勒频移估计方法
在高动态环境中对多普勒频移估计算法的研究最早也是最有成绩的是美国JPL实验室,该实验室曾经研究过以下算法:
①近似最大似然估计(MLE)的跟踪和捕获算法,该算法是基于N个连续同相和正交采样值来对频率及其时间导数进行估计的。
②采用扩展卡尔曼滤波算法(EKF),即一种使用准最优递推估计接收的相位及频率跟踪算法进行载波跟踪。
③交叉自动频率控制环(CPAKC),即一种简化的估计淹没于噪声中正弦信号频率并有极高动态的准最优算法。
④频率扩展卡尔曼滤波器(FEKF),即一种先对去除相位影响后的数据进行叉积,再进行低节次EKF的频率估计算法。
在设计高动态GPS接收机时可权衡工作门限(频率失锁概率为10%时的信噪比)、不同信噪比时的频率误差、算法复杂程度以及需求特点等因素,选择合适的载波捕获跟踪算法以满足接收机性能和信号处理复杂程度的要求。
1.2.2 通过惯导辅助而获取多普勒频移的方法
研究表明,将GPS系统和目前常用惯导系统进行组合可显著增强普通GPS接收机在高动态环境下的适应能力,且组合的定位精度明显提高。这是因为将两个系统的输出信息通过卡尔曼滤波器进行组合,利用惯导加速度计的速率数据(包含多普勒频移信息)作为GPS接收机码跟踪环路和载波跟踪环路的辅助信号,在高动态环境下,可显著降低GPS接收机对动态信号跟踪能力的要求,从而提高其对动态的适应能力和抗干扰能力。另外,当因干扰和姿态变化而丢失GPS信号时,此组合方式还具有快速重捕能力。
2 设计高动态GPS接收机的关键技术
现以设计高动态GPS接收机过程中用到的技术加以说明。所设计的GPS接收机除了采用近似最大似然估计(MLE)技术估算距离和距离变化率,从而在高动态环境中实现载波跟踪外,还采用了窄带相关器技术、多星技术、载波辅助技术、卡尔曼滤波技术和差分技术来提高定位精度。下文主要分析窄带相关器技术、载波辅助技术和多星技术,其他技术已多有论述,这里不再涉及。
传统的GPS接收机在对伪随机码进行延时捕获跟踪时,其迟早相关器都用1个码片的长度作为延迟间隔,但在对C/A码跟踪时采用窄相关间隔(如采用1.0~0.05码片长度)具有明显的优越性,可在出现噪声和多径干扰时减小跟踪误差。因为码相关器中迟早信号中的噪声成分是相关的,在进行迟早处理时两者趋于抵消;由于PDLL鉴相器中的多径信号较少扭曲而导致多径效应减小,从而提高定位精度。实验表明,在C/A码跟踪环路中采用窄间隔相关器(间隔为0.1码片),仅靠伪距求解的实时定位精度可达到<1m;载波相位平滑下的码伪距解精度达0.5m水平。在本课题方案中采用的码片间距是0.5码片而不是通常的1码片间隔。
载波辅助技术以两种方式辅助码环跟踪。由于码相率与载波相位率成正比,利用可获得的载频(多普勒频移)控制C/A码的数控振荡器,使之对动态不敏感,从而提高测码伪距的精度;另一方面,当载波相位正确积分时,其变化正比于卫星伪距变化即Δ距离,因此可利用Δ距离来平滑伪距噪声。
多星技术即多通道技术。事实上通道数目的增加可获得显著的性能提高,因为不同的卫星数目越多定位精度越高。这主要表现在卫星数目增加一倍时定位噪声可降低3dB。另外,12通道系统实质上清除了优化选星的烦琐,并为偶然的信号丢失提供了一个简捷的处理方法,12通道系统在冷启动模式下还具有一个最大的优点,即可对卫星信号进行盲搜索。
目前我们设计了一种模块式并行12通道高动态GPS接收机,实现框图如图1所示。其基本设计原理是将接收到的GPS射频信号通过前置滤波模块滤除带外干扰,然后在射频前端模块中变频到中频信号,再在信号处理模块中与内部产生的载波及伪随机码相关,恢复基带信号并获得定位解算所需的伪码和载波观测量。该接收机通过采用近似最大似然估算(MLE)方法来估算接收机相对卫星的伪距离和距离变化率,以此满足在高动态环境中对伪码和载波频率的跟踪;通过采用DSP技术设计了满足高动态跟踪所需的跟踪滤波器;在射频前端采用了低噪声放大器来保证GPS接收机在较低信噪比下可靠跟踪卫星信号;通过采用并行12通道模块化设计及提高定位精度的相关技术,使得接收机具有良好的噪声性能和动态性能,并有效地提高了定位精度。该接收机可以较好地在没有惯导辅助的导弹、军用飞机等高动态用户载体上工作。
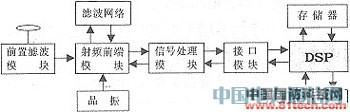
图1 高动态GPS接收机实现框图
3 GPS在导弹制导方面的应用
研究表明,理想的导弹制导系统应满足如下要求:全球覆盖;高的相对精度和绝对精度;对高动态载体具有良好的实时适应能力;能够提供三维位置、三维速度和姿态数据;工作不受外部环境影响;具有抗人为和非人为干扰的能力;不被他方利用;可供我方广大用户使用;能随时、自主地进行故障检测和故障排除;高的可靠性;与现行机载设备的规范要求相符;价格适中,为广大用户所接受等等。目前,导弹制导系统大都采用惯性制导系统(INS),这种系统由于存在误差随时间而积累的固有缺点,所以很难满足高精度、高可靠性等制导系统的要求。研究表明,在影响导弹制导精度的误差因素中,惯导仪表的测量误差是主要误差源。鉴于制导系统的要求以及惯导系统的固有缺陷,目前提高制导系统精度一般有两条途径:采用新的制导系统和完善现有的惯导系统。
3.1 高动态GPS接收机在导弹制导中应用
采用新的制导技术是制导领域一直关注的问题,随着GPS这一全球卫星定位系统的建成,基于GPS系统的新型制导系统可以较好地满足导弹制导的诸项要求,用GPS制导系统来替换现有的惯导系统,实现导弹的长距离、高精度制导已引起越来越多的关注。
用高动态GPS接收机进行导弹制导需要解决的两个关键问题是:GPS全向天线的研究和基于GPS技术的导弹姿态测量方法研究。这两项研究已有所突破,这里不再赘述。图2是基于高动态GPS接收机的导弹制导系统组成框图。其基本工作原理是:由GPS接收机测量出导弹的实时位置并与存储在程序装置中的预定轨道参数进行比较和计算综合,然后通过姿态控制系统控制弹体运动;而导弹的姿态信息也通过GPS接收机实时监测,并适时控制导弹进行调整,整个制导系统是一个闭环系统,最终将导弹引向目标。
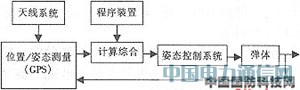
图2 基于高动态GPS接收机的导弹制导系统组成框图
3.2 GPS和惯导组合的制导方法
完善现有的惯导系统就必须减小惯导仪表的工具误差。目前通过提高惯导仪表质量而减小工具误差的方法越来越困难;而采用组合制导技术来修正工具误差的方法周期短、成本低,随着GPS技术的出现,这种方法越来越受到重视。
普通的GPS接收机在高动态环境不易捕获和跟踪信号,甚至产生整周跳变现象;而惯导系统可实时提供多种导航信息,但其导航误差会随时间而积累,影响制导效果。GPS/INS组合制导系统使得新系统既具有惯导系统较高的相对精度,又具有GPS较高的绝对精度,并容易提供载体的姿态信息。用GPS连续提供的高精度位置和速度信息可以估计和校正惯导系统的位置误差、速度误差,从而显著提高惯导系统的定位精度;而借助惯导系统的加速度计速率信息,可改善GPS接收机的动态性能,使GPS接收机能够在高动态环境快速捕获和重新捕获卫星信号。因此,GPS和INS的组合可以构成真正理想的制导系统。惯导与GPS的组合方式一般可以分为两大类:重调式和卡尔曼滤波方式。
重调式是简单的组合方式。实质上,这种组合只是GPS向惯导单方向的校准,虽然有简单、易于实现的优点,但组合的潜能远没有发挥出来。
在卡尔曼滤波方式中采用了组合导航滤波器(实质上是一种卡尔曼滤波器),通过估计惯导仪表的误差改善惯导系统的定位精度;如果惯导的速率数据作为GPS接收机码跟踪环路和载波跟踪环路的辅助信息,在高动态环境下可降低GPS接收机对动态信号跟踪能力的要求,从而提高抗干扰性能。另外,当因干扰和姿态变化丢失了GPS信号,此组合方式还具有快速重捕能力。图3为典型的GPS/INS组合系统的结构图。

图3 典型的GPS/INS组合系统的结构图
GPS和INS组合制导(导航)系统,兼顾了两系统的优点,抑制了两分系统的不足,且增加了系统的冗余度,相应提高了载体的导航或制导精度,是较为理想的组合制导(导航)系统。
4 结论
现有的惯性制导系统不能充分满足导弹精密制导的需要,而基于GPS技术的现代制导系统具有许多惯性制导系统无法比拟的优点,有广阔的发展前景。