ժҪ������һ�ֻ���ADSP21060��Virtex II������ͼ����ϵͳ��������ͼ����ϵͳ�Ĺ��ܺ��������˴���ϵͳ��Ӳ���ṹ��FPGA�Ĺ���ģ�顢DSP��������ܺ�ģ�顣ͨ������ԭ��������������֤��ϵͳ��Ƶ���ȷ�Ժ�Ч�ԡ�
ͼ����ϵͳ�����DSP���С�DSP��FPGA/CPLD����FPGA/CPLD�����ȷ�ʽ���ɡ�����DSP���й��ɵ�ͼ����ϵͳ�����ŵ��Ǵ������ܿ���ͨ����������ģ���ȱ����Ҫ�й��Ĵ�����ɱ��ߣ����õ���FPGA/CPLD�ȿɱ���������ɵ�ϵͳ�����Ա���DSP����ϵͳ���Ĵ�������ȱ�㣬�����Ը���ϵͳҪ����Ӳ�����������������ã������ڸ��ӵ��㷨������Ƹ��Ӷȼ�������������Ϊ��ˣ���ǰ�ܶ����ѡ��DSP��FPGA/CPLD�Ľṹ������ͼ����ϵͳ�����ռ�̫����Զ������ͼ����ϵͳ������һ�ֻ���DSP��FPGA�����ͼ����ϵͳ������������ϵͳ�Ĺ�������ϵͳ�ṹ��FPGA��Ƶ���ģ�顢DSP�������ṹ��ԭ��������ʵ������
1 ͼ����ϵͳ�Ĺ��ܺ�����
1.1 ϵͳ����Χ�ӿ�
ϵͳ����Χ�ӿ���ͼ1������ϵͳ��������CCD��Ԫ��ͼ�����ݺ�ͬ���źţ�ͬʱ��CCD��Ԫ�ṩ��λ���عʼ�����ݶ����ȿ����źţ�CEU��һ���������������Ϳ���CCD��Ԫ��ͼ������Ԫ��ѹ����Ԫ��CEU��Ԫ��ͼ����ϵͳ�����������CCD�궨�������Ĺ۲���Լ��۲����ݴ�������Ҫ�����ݣ���۲�ģʽ��ʱ��ȣ�ϵͳ��������ɵ������͵�ѹ����Ԫ��һ��ѹ����

1.2 ϵͳ��ͼ��������
ͼ����ϵͳ�������ǽ���CCD������ͼ���ͬ���źţ�����ͼ����֡�����У��������У������ͼƫ������ͼ���ʽ����Ȼ��������͵�ѹ����Ԫ����ѹ����
(1)ͼ����֣�Ҳ����ͼ��Ķ�֡���ӣ���Ŀ�����������Ⱥ�����ͼ���ʱ���������ѹ�����������ռ�̫����Զ���������۲�ģʽ���ֱ��DZ���ģʽ�����ģʽ������̬ģʽ�������㣬���ֹ۲�ģʽ��ͼ����ֵ�֡���ֱ��ǣ�4֡��24֡��240֡��ÿ��ģʽ��˳�ι۲��������������������ֱ��ǣ�SV1��SV2��SQ1��SQ2��SU1��SU2������ģʽ�Ĺ۲�ʱ����30s��30s��ʱ�����������ŵģ�ÿ�����������ɼ�4֡��ÿ��һ֡��Ȼ��1s����ƫ���ѧԪ�����л������ֱ�����������۲���ϡ����ģʽ��6�������ı������ڹ��ɣ��۲�ʱ����3min��������̬ģʽ����10�λ��ģʽ���ڹ��ɣ��۲�������30min��
(2)ͼ��ķ���У����ͼ�������ܵ������Ŷ����������������ԡ��������ߵȷ����Ӱ�죬ͼ�������������˻���������з���У������Ҫ����CCD��У��(������ƫ�á�ƽ��)�����ưߵ�������������档
(3)ͼ��ļ���У����ͼ��ļ���У�����������������ļ��λ����У��������ϵͳ������������ͼ��������λ��䣬�������У��������ͼ��Ư�Ƶ�У����������ؼ���������ͼ������ڲο�ͼ��ĵ�Ư�������ٲ��������ڲ��ۼӵķ�ʽ��ʵ��Ư��ǰ��ͼ��Ļ������⡣����̫�������Ĵ������������У��ֻ������ģʽ�۲���У���������3min��ΪУ��ʱ������
(4)ͼ���ƫ����㣺�ռ�̫����Զ����Ҫ����̫���ų���������ͼ��ƫ�����Ҳ����Ҫ����֮һ���ų�ͼ��Ĺ��㻹������������ѹ��1.5����
(5)ͼ���ʽ������ͼ�����ͼ��ͷ��Ӧ�����������š�ʱ�䡢�۲�ģʽ���۲�����ȡ�
2 ͼ����ϵͳ���
2.1 ϵͳ�ṹ
ϵͳ��Ӳ���ṹ��ͼ��ͼ2��FPGA�е�Ӳ��ģ�飬�������ֵ�Ԫ����·���ص�Ԫ������SDRAM�������ʹ��ڿ�������DSP���������߶����뵽FPGA�ڲ����洢��������SDRAM��Ԫ��һ��SRAM��Ԫ���ɣ�SRAMֻ��DSPʹ�á�ϵͳ����CCD������ͼ���ڻ��ֵ�Ԫ����ͼ����֣����־�����ͼ������DSP���з���У��������У����ƫ������ͼ���ʽ���Ȳ��������ͨ��DSP��Ƭ�ϴ��ڽ�ͼ���͵�ѹ����Ԫ��ͨ�����ڵ�Ԫϵͳ���������Ԫͨ�ţ����ܹ����Ϳ��ơ�����ͼ�������DSP�����ݴ��������ݴ�����ͬʱ���н��еģ���˻�������DSP�������������Ĵ洢����Ϊ�˱���ͼ���ڻ�������DSP�Ĵ洢��֮�����ؽ���ͼ���ͣ�������в��ö�·���ؽ��д洢��ƹ�ҷ�ʽ�л���

ͼ2 ϵͳӲ���ṹͼ
2.2 FPGA��ģ��
FPGA�ڲ���Ƶ���ģ����Ҫ����ͼ����ֵ�Ԫ��ͨ·ѡ��Ԫ���첽ͨ�ô���(UART)��Ԫ������SDRAM���ƺ�����������������ֱ���ܸ���Ľṹ������SDRAM�������ʹ��ڵ�Ԫ(UART)������IP��ʵ�֣����ﲻ����ϸ���ܡ�
2.2.1 ���ֵ�Ԫ
���ֵ�Ԫ��Ҫ������¹��ܣ�(1)��������ʱ�����CCD��ͼ�������ڼĴ����У�(2)���ֵ�ַ������(3)�洢�����ƣ�(4)���ֲ�����(5)������չλ���㣬��ÿ�������ĵ�һ֡ͼ�����ʱ��������֣�������Ѵ洢���ĸ�λ(������չλ)���㣬��������������㣻(6)ÿ֡ͼ����ֽ���������Irq�ź��ж�DSP���Ա���DSP���й������š�
���ֵ�Ԫ������ͼ��ͼ3��������������£�(1)CCD��������(CCD data)��ͬ���ź�——��ͬ��(ps)����ͬ��(ls)��֡ͬ��(fs)��(2)DSP���ݡ���ַ�Ϳ������ߣ�irq�ǻ��ֵ�Ԫ����DSP���ж��źţ�(3)��洢�����ӵ����ݡ���ַ�ʹ洢����������——data��mctrl��addr��(4)����CCD���ź���——reset��start��read��
ͼ3��ɫ�ķ�����DSP�洢����ַӳ��ļĴ��������ڶԻ��ֵ�Ԫ���п��ƺͶ�DSP���ݴ���״̬���б�ʶ����ɫ�ķ������ǻ��ֵ�Ԫ��Ӳ���ṹ����CCD����������ͨ�����ݼĴ���(OP1)����Ϊ�ķֵĵ�һ�����������Ӵ洢������������ͨ�����ݼĴ���(OP2)��Ϊ���ֵĵڶ�������������CCD������ͬ���źţ��͵�֡�ڵ�ַ����������Ϊ��ַ�����źţ������ɴ洢����Ҫ�Ŀ����źţ�CCD������OP1���Ĵ棬ͬʱ������ַ���ڴ���ȡ��Ҫ���л��ֵIJ�����OP2��Ȼ���ڵ�ͬ���źŵ��½��أ����л������㲢��ش洢����
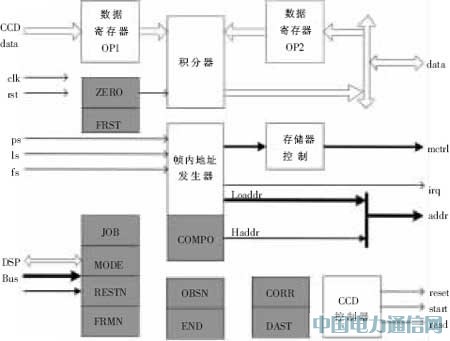
ͼ3 ���ֵ�Ԫ�ṹ
2.2.2 ��·���ص�Ԫ
��·���ص�Ԫ��ͼ4��ʾ������Ԫ�Ĺ�������ɻ�������INT bus��DSP bus��SDRAM1��SDRAM2ƹ�����ӽṹ���л����л������������ߣ����ݡ���ַ�Ϳ������ߡ��л�ͨ��һλ�л������ź�ʵ�֣������ź���DSP��ַӳ���һ��һλ�Ĵ�������DSP����ƹ���л���
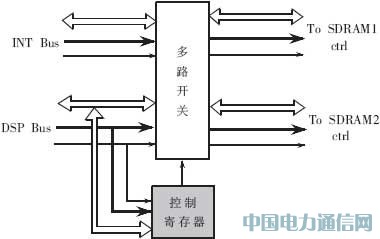
ͼ4 ��·���ص�Ԫ
2.3 DSP�����ṹ
�������ְ���ϵͳ������ܺ���������ģ�顢�жϷ������ȣ���������̺����ݴ������ƣ�����������DSP��ַӳ��ļĴ�����״̬��
2.3.1 DSP��FPGA�еĴ洢��ӳ��Ĵ�����������
��һ��Ĵ���������FPGA��ʵ�ֵġ���ҵ(ָ��)����16λ�Ĵ���������DSP��ַ�ռ�ϴ�Ϊ�˷����̣��Ĵ���������ƴλ�ķ�����ϵͳ�Ĺ��� ��CEU�Ŀ��ơ�CEU��������ָ���ʽ��ͼ5(a)������DT��ʾCEU�������������ͣ�00��ʾ���ݡ�01��ʾ�۲�ָ�10��ʾCCD�궨��11��ʾ�Բ⡣����ʱ������������ֱ��д��JOB�����������У��������ݣ��������ʹ�ŵ���Ӧ��λ�á�Parameters�Ǹ��ֹ���״̬�����������/�Բ�Ҫ��IJ��������Ե�Ҫ��(���ݡ�����ѡ��)����Ӧ��ϢҪ�۲�ģʽ�ʹ�����CCD�궨Ҫ��IJ������궨�����ݵȣ��Ա���DSP�鿴��

ͼ5(a) CEU�����ʽ�� �� �� �� ��ͼ5(b) ϵͳ��ҵ��ʽ
��ͼ5(b)����CEU��������DT=01ʱ����Ϊ�۲�����۲���ҵ�ĸ�ʽ�磺00��ʾ����ҵ������01��ʾ�۲�ָ�10��ʾCCD�궨��JT=11��ʾ�Բ⣻mode�ǵ�ǰ�۲�ģʽ��־��001��ʾ����ģʽ��010��ʾ���ģʽ��100��ʾ����ģʽ��Observ_Num�������۲�ͬһ��ģʽ�Ĵ�����־��
(1)��ҵ���ͼĴ���(JOB)����ʶϵͳ��������(��ҵ����)����CCD�궨���۲⡢�Բ��Եȣ�(2)ģʽ�Ĵ���(MODE)����ʶ�۲��ģʽ������ģʽ�����ģʽ������ģʽ��(3)�۲�����Ĵ���(OBSN)�����ڱ���һ����ҵ�Ĺ۲������(4)����̬�Ĺ۲�����Ĵ���(RESTN)��ֻ��������ģʽ�Ĺ۲⣬��Ϊ����̬ģʽʱ����������־3min�۲�Ĵ�����(5)֡������(FRMN)�����ڼ�������ģʽ�����ģʽ������ģʽ�µ�ǰ24֡ͼ���Ա����ڸ�λ�����ź����ɺ͵�ַ��λ���ɣ�(6)SW��·���ƼĴ���(SWCTRL)�����ƶ�·���ص��л���(7)reset�Ĵ���(FRST)������DSP����FPGA��INT��Ԫ��ʱ������λ��ÿ�ι۲���������븴λһ�Σ�(8)�����ʶ�Ĵ���(ZERO)����DSP����FRMN��ֵ��������ʵ�ָ�λ����������(9)�����Ĵ���(COMPO)����DSP����FRMN��ֵ��������ʵ�ָ�λ��ַ���γɣ�(10)��ҵ�����Ĵ���(END)����һ����ҵ����ʱ���ôμĴ������б�־���Ա㽫�����PC������ҵ�����ڣ�(11)����״̬�Ĵ���(DAST)��DSP�洢������״̬��ʶ��û�����ݡ�����ģʽ�Ĵ��������ݡ����ģʽ�Ĵ��������ݡ�����ģʽ�Ĵ��������ݡ�����ģʽ���������ݼ����ͳ����ݵȡ�DSP��������״̬�۲�ģʽ�����Խ�����Ӧ�Ĵ�����(12)�������״̬(CORR)����ʶ��������õ����ݵ�״̬��
2.3.2 DSP�Ĵ洢���ռ����
DSP��SYSCON�Ĵ�����15��12λ(MSIZE)������������MS0��MS3��ΪƬѡ�ź�ʱ��ÿ������Ŀռ��С���乫ʽΪ��MSIZE=log2(���С)-13��ȡÿ����Ĵ�СΪ16MB�����MSIZE=1011��
·Ƭ�ڿռ䣺0000��0000H��0007��FFFFH��
·MS0——���ݿռ䣺0040��0000H��13F��FFFFH�������ǵ�����õģ����һ����Ԫ�ŵ�һ�����ݣ����У�
��SQa��40��0000��5F��FFFF�� ��SQb��60��0000��7F��FFFF
��SUa��80��0000��9F��FFFF�� ��SUb��a0��0000��bF��FFFF ������SVa��c0��0000��dF��FFFF�� ��SVb��e0��0000��fF��FFFF
��Rest2m��100��0000��11F��FFFF�� ��unused��120��0000��13F��FFFF
·MS1——SRAM�ռ䣺140��0000H��23F��FFFFH��
·MS2——CCD������240��0000H��33F��FFFFH�����ð�����ƫ�ú�ƽ��ͼ��3֡2048×1024ͼ��
·MS3——δʹ�ã�340��0000H��43F��FFFFH��
·δ����ռ䣺4040��0000��FFFF��FFFF���д洢��ӳ��ļĴ�����
2.3.3 DSP�������ṹ
DSP������������ͼ6��ϵͳ��ʼ��������ҵ��ѯ�����ݲ�ѯ�����������Ӧ�Ĵ�������(CCD�궨���Բ��ԡ��۲�)��ͼ6�н��Թ۲���ҵΪ������˵��������۲��������DSP�Ի��ֵ�Ԫ����Ӧ�����ã�������ɺ�������ʼ�����ػ��ֹ�����DSP���Ų�ѯ���ι۲��Ƿ�������������ص���ҵ��ѯ�������жϴ洢�������ݵ� ״̬����������״̬��������Ӧ�Ĵ������������������ݸ���FLAG0�ı�־��������ѹ����Ԫ�������ݡ�����ģʽ�µ�ͼ����������ͼ��ͼ7��ͼ7��ccdst( )��ͼ�����궨�ӳ���format()�Ǹ�ʽ���ӳ����ڲ�������������ڲ巽��������������FFT����FFT������
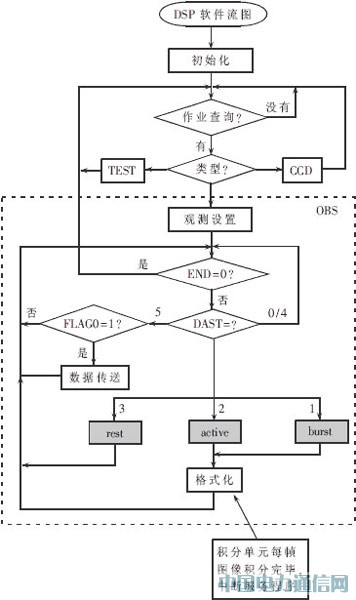
ͼ6 DSP��������
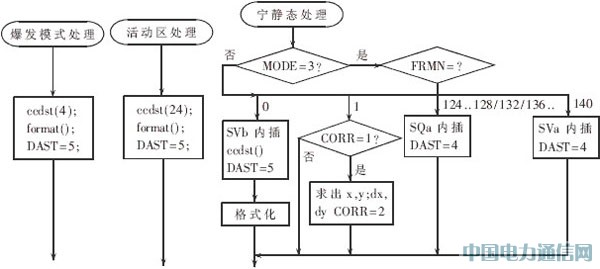
ͼ7 ͼ��������ģ����ͼ
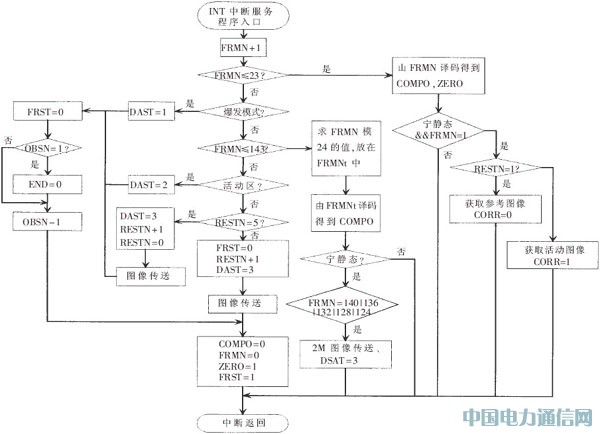
ͼ8 ���ֵ�Ԫ�жϷ��������ͼ
��������������ݴ��������⣬DSP����һ����Ҫ���ж��ӷ����ǻ��ֵ�Ԫÿ֡ͼ�������ϵ��жϷ�����������̿�ͼ��ͼ8�������ݻ��ֵ�ͼ��֡���۲�ģʽ���жϹ۲��Ƿ���������ݲ�ͬ��������û���������Ӧ�ļĴ�������Щ�Ĵ��������Ż������Ĺ�����Ϊ��DSP�����ݴ���������ͼ8�вο�ͼ��ͻͼ��Ļ�ȡ���ڲɼ�����2048×1024ͼ������ģ���ȡ256×256���ӿ飬Ҳ����˵���������������֡256×256��ͼ��֮����еģ�����ͼ���Ͳ��������ǵ�����ģʽ�����ݴ�����Ҫ��Ĵ洢���ȱ����ͻ��ģʽҪ��һ����Ϊ�˲��Ѵ洢����Ƶ�̫��������ģʽ�����ٲ���ƹ�Ҵ洢���л��Ľṹ�����������ݾ���ʱ�����ù�ѧ����������1sʱ�䣬�����־�����ͼ��DSP�Ĺ������ڡ�
3 �������ƺ�ʵ����
ԭ�����������ƹ����У�DSP������AD��˾ADSP21060������ƽ̨����VisualDSP2.0��FPGA����ѡ��Xilinx��˾100���ŵ�Virtex IIϵ������������ƽ̨����ISE6.2������ɵĵ��������ﵽ�˺�ͬ��Ҫ����(����ҳ) DSPӲ��������������������Ӳ�����ԣ����ȶԸ��ӿڽ����˲��ԣ��ڱ�֤���ݿ�����ȷ�ؽ��պͷ��ͺ���ϵͳ�Ĺ��ܡ���Щ���Ծ���һ��ר�ſ����ĵ���֧��ϵͳ����ƽ̨�Ͻ��С�������Ԫ���ԣ�����������Ԫ����һ�����ϵͳ����������ϵͳ�����ԡ���������ﵽ���Ŀ�꣬����Ҫ�����ϵͳ�ĸ���ܡ�
�����
[1] �п�Ժ��������̨.�¹����ո߲�����о���. SSTA�౨��[R].��������������̨��1997��1(2)��1��30.
[2] �п�Ժ��������̨���¹�������о���.SST�����о�����[R].��������������̨��1997��30��36.
[3] ������.��ƬFPGAͼ��Ԥ����ϵͳ�������ʵ��.�ͻ���Ӧ�ã�2004��23(4)
[4] ����������Ԫ���ɱ��ASIC��Ƽ�Ӧ��.�ɶ������ӿƼ���ѧ��2000
[5] ����������ѧASIC�о���.VHDL����100�����[M].�������廪��ѧ�����磬1999
[6] ������������. ADSP SHARCϵ��DSPӦ��ϵͳ���[M]. ���������ӹ�ҵ�����磬2003