ժҪ����ARM9������S3C2410��ΪǶ��ʽLinux��ϵͳ����������ƽ̨�������ʺ����Ҫ�������ZigBee�ڵ�CC2430����Linux�ں���ʵ��Э�������ַ�������ʹ��ͨ��IO�������ݴ��䣬�����˴������ݴ������ʵ͡����������Բ������Ʒ�����ȱ�㡣��ϸ�����˸�ϵͳ����ƺͿ������̣���������ͨ��Э���ѡȡ��bootloader���ںˡ��ļ�ϵͳ�Լ����������ʵ�ֺ���ֲ��
ũ���д�Χ�Ļ�����Ϣ����ѳ�Ϊ����Ӧ�÷�Χ�ص�֮һ�����ũ�ﲼ�߲�����ص㣬ZigBee���߽ڵ������Ϊũ����Ϣ�ɼ�ϵͳ����ѡ���ɶ������ֲ������ڵĸ��ֻ����ͼ��������Ϣ����ʵʱ�ļ��[1]��Ȼ���������²���������״̬�ĺ�������λ��ARM��������������λ������λ��ͨ�Ŵ���Դ���ģʽ��ʵ��[2-3]��������ͨ��ģʽ���ڴ��ڴ������ʵ�(������˫��һ��)�����;����[4]�����������(����У��)�Լ���ƴ���Э�鷱��(֡��ʽ)�Ȳ��㡣��˱����о���ZigBee��ARM9�ں��е�Э�����ַ�����������I/O�������ݣ����ƾ���Э�����������豸��ũ���κ�λ�ü����������Լ���Э�����IJ��֣�ʵ�ַ����ݵĶ�̬���ݼ�⡣
1 �����ϵͳ��Ҫ��
����ڵ���Ҫ��ɢ�ֲ�����䣬�Լ�����Ŀ����͵ر����¶ȣ���ˣ������ϵͳ����Ҫ�ļ���ָ��Ӧ���㣺(1)���ġ����ɵ��ܵ��������ƣ���˽ڵ�ģ��ĺĵ���Ӧ�����ܵ͡�(2)�ͳɱ��������Ҫ�������ֽڵ㣬Ͷ�ʳɱ���Ϊ�㷺ʵʩ����Լ���ء�(3)���ӶȺ߿ɿ��ԡ����ڵ㿪���豸Ӧ���ýṹ���ɼ����ݾ����ܾ�ȷ�����۵���ơ��ۺ������ص㣬ZigBee������Ϊ�������Э����ѡ��
ZigBeeЭ���ǻ���IEEE802.15.4���ĵ��ġ������ʡ����Ӷȵ�˫��ͨ�ż��������ɹ����ڹ���������Ȩ��2.4GHz������250Kb/s��������ݴ������ʺ�10~75m�Ŀɿ�������롣ZigBee֧�����͡����͡��ԵȺͻ�����������˽ṹ�������еĴ��豸�ߴ�254����������ͼ1��ʾ�Ľڵ�������ֲ����ص㣬�ڵ��������п�ʵ�ֶ���������·ͨ�ţ���ѡ����ѵ�·�����д��䣬���������ͨ�ŵĿɿ��ԡ�

Э��������������ĺ��IJ��֣��������������������߽�����齨����ά��·�������ն˽ڵ�֮�������ͨ�ŵĹؼ��������̶�����Э�����ڵ���˷Ѵ�������Դ������̬�ز����������λ�õ����ݣ���Э������Ϊ�ƶ��豸��̬�ز�������������õ�ѡ���ҿ��Լ������Э�����ķ��ã���������Ѷȵijɱ���
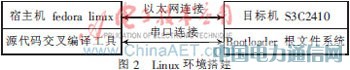
2 Ƕ��ʽLinux�������������Ĵ
Linux����ϵͳ�����Ĵ��ͼ2��ʾ��
2.1 Bootloader����ֲ
Bootloader�Dz���ϵͳ�ں�����֮ǰ���е�һС�γ�����Ϊ�����ں��ṩ���ʵ�Ӳ��������Bootloader�ֳ�Stage1��Stage2�����Σ�����ʵ�ֿ�ͼ��ͼ3��ʾ��
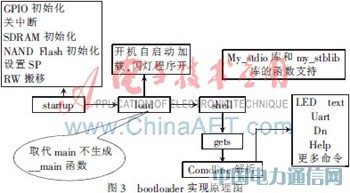
Stage1����Ҫ�ɻ��ʵ�֣�����GPIO������ʹ�������ϵ�LED��˸���ر������жϡ�����ϵͳʱ�ӡ��رտ��Ź���SDRAM��ʼ����ʵ����Ӧ����(�ṩ�����ִ�пռ�)��NAND Flash��ʼ��(������������Ψһ�Ĺ�̬�洢���粻��ʧ�豸)�Լ�����SPջָ��ΪStage2�е�C���Դ���ִ����������
Stage2��ʵ�ּӵ����ƹ��̡����ڵ�����Ϣ�������⡢shell�������չ���ܡ�
2.2 �ں˵ı������ֲ
��Ӳ����ֲ2.6.27�汾��Linux�ںˣ�(1)��ѹ��tar xf linux-2.6.27.tar.bz2�������Ŀ¼��(2)��ֲƽ̨ΪARM��ϵ�ṹ����Makefile�е�ARCH��=arm CORSS_COMPILE��=arm-linux-(�����������ǰ)��(3)�����ںˣ�make deconfig(���ԭ�������config������ǵ�һ�����ÿ�ʡ��)��make menuconfig�������ò˵���ѡ��Ӳ��������������ֿ�ѡ��Ĭ��ѡ���ע����������һ����ѡ��Ӳ������ҲҪƥ�䡣(4)�����ں�make bzImage�ڡ�/linux-2.6.27/arch/arm/boot/bzImage�����ں�ӳ��ͨ��tftp��bzImage�յ���ַΪ0x30008000�ڴ��ϣ�Ȼ����nand erase kernel����kernel�����ϵ����ݣ������nand write 0x30008000���ڴ��ϵ������յ�Flash��Ӧ��kernel�����ϡ�
2.3 ���ļ�ϵͳ����ֲ
����Linux����ϵͳ�������ں����Ҫ���ļ�ϵͳ����mkdir����rootfs�ļ��У������д������ļ�ϵͳĿ¼����װbusybox��busybox��ר��ΪǶ��ʽϵͳ��Ƶģ����Ѵ�������õ�����(��ls��cp��cd��tar��)ƴ����һ���ڸ��ļ�ϵͳ��ֻ��һ����ִ���ļ�/bin/busybox�������busybox�����ӡ���װbusybox�밲װ�ں����ƣ��ڡ�$tar xf busybox-1.9.1.tar.bz2��cd busybox-1.9.1/����ARCH��=arm CROSS_COMPILE��=arm-linux-��make defconfig��make menuconfig����busybox��װ·��rootfs�ļ��С���make��make install��busybox�ļ���һϵ�������ļ���װ��rootfs�¡����������ļ���/bin��/sbin��/usr/bin��/usr/sbin�У�����Linuxrc�����ļ�����װglibc�����⣬��/devĿ¼�´����豸�ļ���������ϵͳʱ�ӿ��������ļ�ϵͳ��ȥ����������·��http��������ļ�������ļ�ϵͳ���ó�YAFFS�ļ�ϵͳ����ֱ�Ӷ��ļ�ϵͳ���ж�д�����ÿ�����ΪNFS��ʽ�����ÿ���ֱ���������ϲ���������ĸ��ļ�ϵͳ�����е��ԡ�
3 Ӳ����Ƽ�����ʵ��
3.1 ϵͳӲ�����
��ϵͳƽ̨�Dz���ARM��ϵ�ṹ��S3C2410��Ϊ��������ͨ����ֲ���ַ��豸������ZigBee CC2430�����շ��ڵ�������ݵĴ��䡣ϵͳӲ�����ͼ��ͼ4��ʾ��

CC2430��һ��������Ƭ��ϵͳ(SoC)���Ը����ܺ͵��ĵ�8051Ϊ�ںˣ�ר�����IEEE802.15.4��ZigBeeӦ�ã��������úܵ͵ķ��ù���ZigBee�ڵ㡣
���е�Ӳ����ͨ������ʵ�����ݴ��䣬���ݴ���ĸ�ʽҪ���մ���ͨ��Э��ĸ�ʽ��װ���������ݵĴ��仹��Ҫ�ڴ���ͨ�Ÿ�ʽ�Ļ������ٽ�����Ʒ�װ���������ݴ����ٶ����������ݴ������͡�������ں��м���ZigBee���ַ��������ʡȥ���ݷ���ʱ�ķ�װ�Լ�����ʱ��Ҫ�������鷳��
3.2 Linux�豸����ʵ��
Linux����������豸��Ϊ�ַ��豸�����豸�������豸���ࡣ�ַ��豸�Ƿ��ͺͽ��ն������ַ���ʽ���С����豸���Ǵ���̶���С�����ݸ��豸�������豸����ͨ��BSD�ӿڷ����豸����������һ����ģ�鷽ʽ��д�����غ�ж����Ҫ��module_init()��module_exit()���[2]��
(1)ģ����غ�ж��
ģ����Ҫ��ں���module_init(zigbee_init)��ʵ�ִ������£�
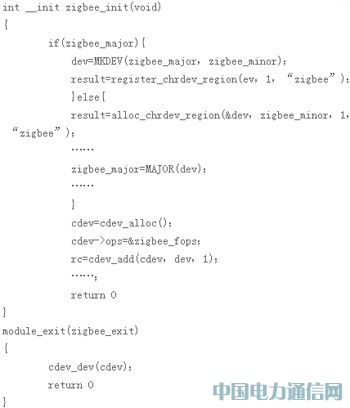
�ڲ�ͬ��ϵͳ�У�ͬһ�豸���豸�Ų�����ͬ�������̬�����豸�ţ����ڻ������ƽ̨ʱ���豸���п��ܳ�ͻ�����Զ�̬���������ѡ��
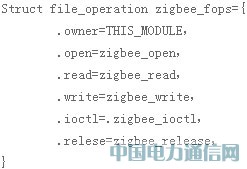
(2)ģ������ʵ��
ע���豸��ź�Ҫ���豸������֮���ӣ���˱�����file_operation�ṹ�������ӣ��������ж�֪ͨ������ݡ���ʵ�ִ������£�
���ϲ�Ӧ�õ�����������ʱ������������Ҫ������¹��ܣ�
�ٳ�ʼ���豸��S3C2410���²�ZigBee CC2430���ӹܽŴ��ڹ���״̬��ע�Ტʹ���жϡ�
�ڰ���ZigBeeЭ��������ݰ�������CC2430��ʵ�ֲ�ͬ�������ʹоƬ������ݷ��ͺ�״̬���ת����
�۵���λ�����յ���������Э�����ʽ����ʱ�������жϣ��û������·������ݡ�
��ʵ�ִ������£�
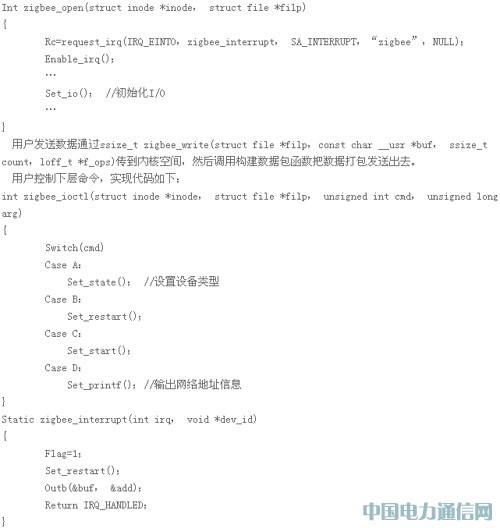
��ʵ�����Ϻ����⣬����Ҫʵ��zigbee_relese(struct inode*inode��struct file*filp)���ͷų���������������Դ��
����ͨ����λ��������ARM9CS3C2410�������ZigBee�ں��ַ����������ɵ�ʵ���˶���λ���Ŀ��ƣ�Ҳ�������û����ϲ㿪�����ṩ���û�����λ�����ݴ���Ľӿڣ��������ô��ڽ������ݴ���ʱ������Ƶķ����ԡ�����ƪ�����Ʊ���û���������²�ģ������ľ���ʵ�ִ��롣ϣ��ͨ�������ܴٽ�ZigBeeЭ���������Ľ�һ��ʵ�ֺ��о���
�����
[1] ����ι�ƽ����������ȣ����ߴ�����������ũ�ﻷ����Ϣ����е�Ӧ��[J].ũҵ������Ϣ��2008(3)��20-23.
[2] ���£����������Ǿ�����.����ARMƽ̨��ZigBee�������[J].ͨ�ż�����2009��42(1)��199-201.
[3] κ�ذ����ƻ�ǿ������Ƕ��ʽARM-uClinux��ZigBee�������[J].�DZ������봫������2009(1)��62-64.
[4] ��������ʯ���䣬����Ȫ.����ZigBee������ũҵ��ʩ���ϵͳ�����[J].ũҵ����ѧ����2007��23(8)��160~163.