ժҪ������βԤ�������������Ӿ�����ϵͳ�е���Ҫ�о����ݡ������һ��Ӧ���ڽṹ����·���������ڵ�Ŀ�Ӿ�������βԤ��ϵͳ����ϵͳ����������ṩ�ĵ�·ͼ�����У���������һ���µı�Ե����㷨ʶ��ǰ����·��Ȼ�����ûҶȡ���Ե�ͶԳ��Ե�����ʶ��ǰ������������������ǰ���ж�����в�ȼ����������ʻԱ�ṩ��Ӧ�����ⱨ���źš���ϵͳ���ںϷʵĸ��ٹ�·�Ͻ�����ʵ�顣ʵ������ʾ��ϵͳ�����ٶȴﵽ������ʻ��ʵʱ��Ҫ���ܹ���ɳ���������ײԤ��������
0 ����
���ڼ�����Ӿ��ĸ��ٹ�·��ײϵͳ�ǵ�ǰ������ͨ����ϵͳ�о����ȵ�֮һ������ڶ��Ļ����¿���ȷ�ش���Ƶͼ�����������ǰ��������ʵ������ϵͳ���ٵ���ؼ����⡣��20������������ܶ��о���Ա�������������˴����о�������˶��ֶ�����ʵ���㷨���ɹ�������һЩ�Ӿ�ϵͳ����Щϵͳ�����õ��㷨�����Ͽ��Է�Ϊ����˫Ŀ�Ӿ��ķ����������˶��ķ������������εķ����ͻ���֪ʶ�ķ���������˫Ŀ�����Ӿ��ķ�������������Ҫ����Ӳ��֧�֣������˶��ķ���������⾲ֹĿ����ʵʱ�Բ�������εķ�����������Ч����ѵ������Ȼ����Ҫ�о������⣻����֪ʶ�ķ��������ϰ�����������ʱЧ�ʽϸߣ������ӻ����´������������ӡ�
��Գ����㷨�IJ��㣬���������һ�־��ȸߣ��ȶ��ԺõĻ��ڵ�Ŀ�Ӿ��ij���βԤ��ϵͳ��������һ���µı�Ե����㷨ʶ��ǰ����·��Ȼ��������Ӱ�����������ϵķ���ʶ��ǰ������������������ǰ���ж�����в�ȼ����������ʻԱ�ṩ��Ӧ�����ⱨ���źš�
1 ϵͳ����ԭ��
ϵͳӲ�����ְ���MCC-4060��CCD�������VT-121��Ƶ�ɼ�����GPS��PC-104���ػ�����ʾ�նˡ�GPSͨ�������ػ����ͱ���������Ϣ����װ�ڳ��ڵ��粣�����CCD�������ͼ��֡ͨ����Ƶ�ɼ������빤�ػ������������Ĵ�������������ʾ�ն��ϱ�ע��ǰ���ϰ���͵�·���ߣ�ͬʱ���ݳ��١������ж�Σ�յȼ���������Ӧ�����ⱨ���źţ�
ϵͳ���������ְ�����·��⡢��·���١�������⡢�������١���ࡢ���ߺͱ�����ģ�顣�����ٴﵽ60km/hʱ��ϵͳ��ʼ����ʵʱ�ɼ�����ͼ�����С�����ÿһ֡ͼ�����ȼ�Ⲣ����ͼ���еij������ߣ�Ȼ���ڳ���ȷ���ĸ���Ȥ�����ڼ�����������������ϰ��������������������٣����ø�����Ϣ��һ���ų��龯����ʵ�ֶ��ϰ������ȶ����ٺ����������������˶��ٶȣ��ж�����в�ȼ�����������Ӧ�ı����źš�
2 ϵͳ�ؼ�����
2.1 ��·���
Ŀǰ����������㷨��Ҫ�����ڹ��ճ���Ļ����¡����ڳ�������·��֮��Աȶȴ���˺��������ø��ֳ����Ե������ӻ�������ij���������Ϣ��Ȼ��ѡȡ���ʵ���ֵ��ͼ����ж�ֵ��������������Hough�任ʶ���ߡ�Ȼ���ڸ��ӹ��ջ����£�ͼ����ܵ����ֹ���ֱ��������η����γ���ɢ��ĸ��ţ�ͼ���ǿ���ܷ�ӳ��������ͻ�����ʣ���������ȷ����������
��ϵͳ������һ�����ù��ܶȲ�õ�����������·�淴���ʲ�������з����Ա�Ե��⣬�ٽ���Hough�任�ij�������㷨�����㷨������Ч����ڸ��ӹ��������µij�����⣬Ҳ��������ҹ��ij�����⡣
���⣬Ŀǰ�����ߵĸ����о���Ҫ���ù̶�������Kalman�˲���������ǰһ֡�������Ľ�������ָ���Ȥ������ʵʱ���ٳ����ߡ�Ȼ�����̶�����2֡ͼ���������������ָ���Ȥ�����ʵʱ�Բ��Kalman�˲������ָ���Ȥ����С�����ײ������������ɸ�������ۻ���������ȷ�ʲ��ߡ���ˣ���ϵͳ�ڸ��ٳ�����ʱ������һ���ںϹ̶�����KaIman�˲������ָ���Ȥ������·�����
һ����˵��ֻ�������߽��߽���(�����)���¡�2������֮���������Ϊ����Ȥ�����ǵ������ʻ�ij�����Ȼ�Ա�������в���㷨���������߷ֱ�������ƽ��40�����أ�ʹ����Ȥ������չ�����Ը��ǿ�������ķ�Χ��
2.2 �������
ͼ���а�������ǰ���ܴ���Ұ�ڵ����壬���·����ľ�������������Լ�����������Ҫ����ȷ����ǰ��������һ�����ѵĹ����������ĵij������ģ������ͼ���Զ��ı����ò���������Ӧ���ϱ仯�ĵ�·��������������
Ҫʵ�ֳ����Ŀ��ټ�⣬������Ҫ���ݳ����Ļ����������г�����⣬�����п��ܵ����Ƴ��������ͼ������ȡ������Ȼ���ٸ������������������������ɸѡ�ų���
2.2.1 �����������
���������õ������dz�����Ӱ����һ��λ��Ŀ�공���ײ����Ҷ�ֵ���Աȸ���·������͵�������һ�㻷�������£��ֳ�����������һ����������
������������������ͼ1��ʾ��������Ӱ�ͳ���һ�����лҶ�ͻ����ص㣬��˿��Ե��ó�������㷨��ͼ2(a)�е�ԭʼͼ������ֵ���������õ�ͼ2(b)�еı�Ե��ֵ��ͼ��ͬʱ��Ҫ��ԭʼͼ����лҶȶ�ֵ�����õ�ͼ2(c)�еĻҶȶ�ֵ��ͼ��Ϊ����ʵʱ�ԣ��Ա�������·�������ƽ���Ҷ���Ϊ��ֵ����ֵ�����ڱ�Ե��ֵ��ͼ��ͻҶȶ�ֵ��ͼ�����˳������µױߣ���������ͼ�����“��”���㣬�Ϳ��Եõ���ͼ2(d)��ʾ�ij�����Ӱͼ��
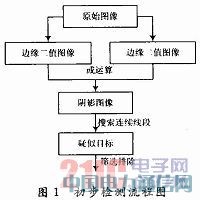
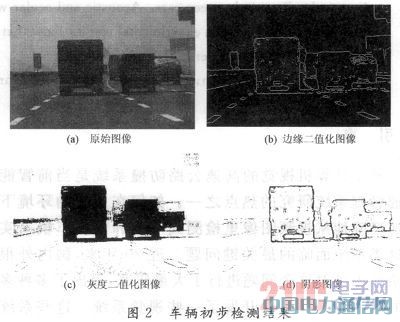
����Ӱͼ����������������������Ѱ��������Ӱ�㳬��һ����ֵ���߶Σ����Դ��߶�Ϊ�ױ���һ������������Ϊ���Ƴ�������Ϊ��֤������������������壬���εĿ��ȱ��߶��Կ����߶��ɿ��Ȱ�����������Ϊ�����ظ�������������������������������Ӱ��ȫĨȥ������ͬһ�����ĸ������ֿ��ֱܷ𱻼��Ϊ����Ŀ�꣬��˻���Ҫ�Ը����ཻ������������кϲ�������ǰ���������ڵ������ܻὫ���Ŀ���϶�Ϊһ��Ŀ�꣬���ǶԱ����İ�ȫ��Ӱ�졣
2.2.2 ɸѡ��֤
�������������Ӱ�������г�����⣬�ڱ�֤�ϵ�“©��”�ʵ�ͬʱ��Ҳ����˽ϸߵ�“�龯”�ʣ���˻���Ҫ�������������ɸѡ����֤��
���ڽṹ����·�����������복�����ȵı�ֵӦ���Ǵ��¹̶��ģ���ô��������Ľ��ࡢ�����ǵȲ����̶���ͼ���ϳ�������(������)�복������(������)Ҳ�����������������֮ǰ���ij������̣��Ϳ��Լ��������Ȥ�����������������ϳ���ͼ����ȵķ�Χ���������Ȳ��ڴ˷�Χ�ڵ���������
�������ij�����֤�����У���õ��ǶԳ��Բ����֤�������㷨�ļ������ϴ��Ҷ��ڱ������ӣ��ԳƶȲ�ͼ�����֤Ч���������⡣Ϊ�˽��������⣬��ϵͳ������һ�ֻ��ڱ�Ե��ֵ��ͼ��ͨ�������������ұ�Ե������֤���㷨��
������������Ŀ���ΪW���������Ե������Ϊ(X1��Y1)���ұ�Ե��ˮƽ����Ϊ(X2��Y2)�����庯����
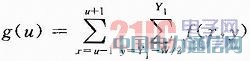
ʽ�У�f(x��y)Ϊ(x��y)��ĻҶ�ֵ��������(X1-W/4��X1+W/4)������g(u)�����ֵ�㣬�õ��Ӧ��ˮƽ����X1’���dz��������Ե���ꡣͬ��Ҳ�����������������ұ�ԵX2’��������ұ�Ե��g(u)ֵ������ij��ֵ����ô�Ϳ����϶��ó���ȷʵ���ڡ�ʵ��֤�������㷨���ų���������“�龯”���õ���ʵ�����������Ե��
2.3 ��������
�ֹ��ĵ���ǰ�������뱾����ԵĶ�άλ�ú��ٶȣ����ֻ��Ҫʹ�ÿ������˲���Ԥ�������x�������ٶ�Vx��������y����������Vy���ĸ�״̬��������������x�����y�����״̬����û��ֱ����ϵ�����Կ��Խ����Ϊ����ֱ�����
�ڳ�����ʻ�����У����ڵ������ڵ���ԭ��ϵͳ���ܻὫ·�ơ���ľ�Ե���������Ϊ�dz����������������龯������Щ�龯��������ֻ����������֡ͼ���д��ڡ��������ȡ��ʩ��ϵͳ�ͻ�ʱ�������̴ٵı�����
��ͼ���������㹻��ʱ������֡��ͬһ������λ�û���кܴ������ԡ�
ϵͳ���ü����������ϵķ��������ݵ�n֡ͼ���õ���Ϣ��Ԥ����ڵ�n+1֡ͼ���е�λ�õ���Ϣ������n+1֡ͼ����ʵ�ʼ��Ľ�����бȶԡ��������ƥ�������ҳ���һ��ֵ�����϶�Ϊͬһ�������������и��١�������������Ϊ�˳��ѱ��ڵ�����ʧ����ʱ������������֡������ȥ��
2.4 ��౨��
������ͨ�����ü���ͶӰģ�ͣ�������һ�ּij���ģ��ʽL×W=C������LΪ������࣬��λΪm��WΪͼ����Ŀ�공�����������ȣ���λΪpixel��CΪ��������ͨ�����ȵı궨��á�Ȼ�������䰲ȫ����S���������Ƶ����ٽ簲ȫ���ʽ��̬�õ���
ʽ�У�VrΪ��Գ��٣��ɶԲ�������õ���Գ��ٺ���п������˲��õ���VbΪ�������٣���GPS�õ���
����澯Ƶ�ʹ��ߣ�����ʹ��ʻԱ��Դ��⣬���Ϳ���ʹ��ʻԱ������������Ӧ����˸�ϵͳ������Զ���������α�����
������d≥1.5S���ж�Ϊ3����в�������������ı����������Ѽ�ʻԱǰ�����ϰ��������Σ�գ�������S≤d≤1.5S���ж�Ϊ2����в�������ϼ��ٵı����������Ѽ�ʻԱ���٣�������d≤S���ж�Ϊ1����в�������̶����ı����������Ѽ�ʻԱ�ƶ���3��״̬�µĸ澯������ܴ�ʻԱ���Ժ����ظ��ݱ������ж���в�ȼ���
3 ������
ϵͳ��ܼ������㷨��Boiland C++ Builder 6�����±�����ɡ�Ϊ����֤ϵͳ�㷨�Ŀɿ��Ժ�ʵʱ�ԣ������ںϷ��л��Ǹ��ٹ�·�ϲɼ���ͬ���͡���ͬ·�Ρ���ͬ�������¶����·ͼ����Ϊ�������У������˴���ʵ�顣
ͼ3Ϊ���͵�·�����µ�ʵ������ͼ3(a)Ϊ���Ϳ�����(b)ΪС���������(c)ΪԶ���봦��(d)Ϊ�����봦�ļ������ϵͳ������Ŀ���úڿ��dz�����
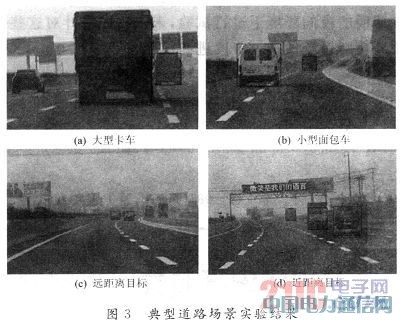
���Կ�����ϵͳ�ܹ����������ڲ�ͬ�����ϵĸ��ֳ��ͳ������ڸ��ٹ�·�ϵ�ʵ�����������������100 km/h������£�ϵͳ��Celeron M 600 MHz�������ϵĴ����ٶ�Ϊ8 j/s���ң�Ҳ����˵����һ֡ͼ���ʱ���ڳ�����ʻ3��4 m����������ʵʱ������Ҫ����һ����������£�ϵͳ����������������볬��200 m���ӳ���ԶԶ�����״�(һ��Ϊ±7°)��
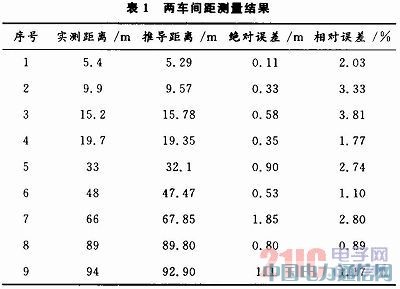
Ϊ����֤��Ŀ�Ӿ����ȷ�ԣ������ڵ�·�ϲɼ���ǰ���뱾�������5��100 m��һ��ͼ�Բɼ���ͼ����д������ݹ�ʽ�Ƶ���������ǰ�������Լ�ʵ�ʾ������1������������ʾ����Ŀ�Ӿ������������5�����ڣ���������ʵ�ʹ����в��澯����Ҫ��
4 ����
���������һ�����ڵ�Ŀ�Ӿ�������βԤ��ϵͳ����ϵͳ������һ�ֻ��ڹ��ܶȲ�ĵ�·����㷨����ʹ����һ���Գ�����Ӱ���Ϊ�������ұ�Ե���Ϊ���ij���̽�ⷽ����ͬʱ�����˼�ʵ�õIJ��ͱ������������ٹ�·�ϵ�ʵ����֤���˸�ϵͳ��ʵʱ�ԡ�³���Ժ�ȷ�ԡ���ϵͳĿǰ��û��������������ȱ��������ҹ�价���½������飬δ�����ǽ������Щʹ�û�����ϵͳ����һ���Ľ����Ż���