���������ָ���ڸ�����ͼ�����Ƶ���ж������Ƿ����������������ڣ����һ��ȷ�������ĸ���������λ���Լ���С�Ĺ���[1]��
��Ϊһ��ģʽʶ�����⣬�����������������������ݣ�һ��������ȡ�����Ƿ������ơ���������Ϊ���õ����ֲ�ͬģʽ��������һЩ�µ��������壬ʹ�����������ȡ[2]����չ��������[3]��������AdaBoost�㷨����������ѡȡ��������ǿ���������ǿ�������ķ�������Ʋ���ͷ����������Ժܺõؽ��ֱ�����������������[4]��
FPGA���Ź������ڲ������кͷḻ��������Դ���ر��ʺ��������źŴ������������õIJ����ԺͿ���չ�ԡ���ˣ��ر���������������ж�����ڲ��д����Լ��������IJ������㡣
1 �㷨����
1.1 ������
�����������������ܳ߶ȱ仯Ӱ��Ƚ����غͲ����ڹ������ٷ�������ȱ�㣬��ˣ�Ϊ�˸��õ����ֲ�ͬģʽ�����IJ��������������һ������������������Ϊ���ھ������ػҶȾ�ֵ֮���ʽ(1)��
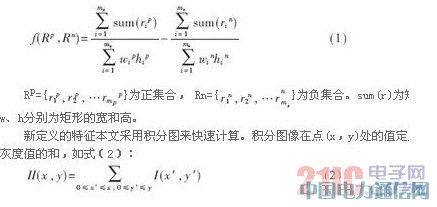
���У�II(x��y)Ϊ����ͼ���ڵ�(x��y)����ֵ��I(x′��y′)Ϊͼ���ڵ�(x′��y′)����ֵ��
�����������һ���������˶����������г߶ȷ���ʱ����������Ҽ����˹��նԼ���Ӱ�졣
1.1.1 ��������Ľ���
Ϊ����ʵ�֣����IJ���һ�������Ÿ��������״ģ����ͳһ��ʾ��������,�Ÿ����������С��ͬ������ģ��������ԣ��������Բ�ͬ��ģ��ľŸ�����������״̬��1��0��-1���ֱ���ðס��ڡ�������ʾ���ھŸ������У����������϶���Ϊ��״ģ���а�ɫ������ɵļ��ϣ����������϶���Ϊ��״ģ���л�ɫ������ɵļ��ϣ���ɫ����û��ʹ�á�
���ǵ������ı�ʾ�����������ٶȣ�����ֻѡ��������16�ֱ�ʾ����ǿ�����ڿ����������״��Ϊ�������⣬16����״ģ����ͼ1��ʾ��

1.1.2 ������ֵ�Ŀ��ټ���
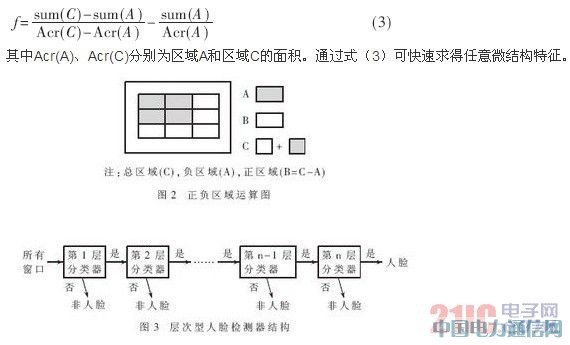
Ϊ������ȡ������������ת��Ϊ���������������ȡ���㣬�Ե�13��������Ϊ����������������ͼ��ͼ2��ʾ���Ƚ������κϲ�Ϊһ�����Σ���ͼ��A������ʾ��Ȼ����ȡ�Ÿ�����ĻҶȺͣ���ͼ��C�������ػҶȺͣ����ͨ��C��A��ȡB�������ػҶȺ͡�����ʽ(2)���ɵ�sum(B)=sum(C)-sum(A)�������������Ҳ����ͨ�����Ʒ�����ȡ������ʽ(1)�ɵõ���
1.2 ��������
Ϊ���ڼ���ʲ���������������ٶȣ����IJ��ò��������������ṹ����ͼ3��ʾ���ýṹ��Ϊ12�㣬ÿһ�㶼��AdaBoost �㷨ѵ���õ���һ��ǿ������.������ֵ������ʹ��ÿһ�㶼���ü���ȫ����������ͨ�������ܾ��ܴ�һ���ַ���������������������ǰ��ĸ��㣬�����������������ɾܾ��ֵķ���������������������ĸ��㣬����ô������������ų����������ķ�������ѡͼ��ĸ��š�
1.3 �������
���������������ж�һ���������ڵĻ���������ͼ4��ʾ��
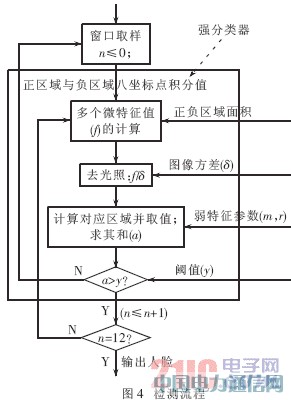
������̣�(1)����ȡ�����ں���������Ϣ�����ÿ�����������ֵ��(2)������ֵ���Դ��ڵĻҶȷ���õ���һ����ֵ(f)��ʵ�ֹ�һ��������(3)���������ѵ�����õIJ���(m��r)������һ����ֵ���д�����h=(f-m)/r��(4)���h���Ӳ��ұ���ȡ����Ӧ�ĺ���ֵb��(5)��ǿ����������������������Ӧ������ֵ��ӣ�a=Σb������a�뵱ǰ�����ֵy�Ƚϣ��ж�ͨ�����
���ѭ��12���Լ���������
2 Ӳ�����
����ϵͳ��ΪƬ�ڡ�Ƭ�������֣�ϵͳ�ṹ��ͼ5��ʾ�����У�Ƭ��(���洢�����洢ͼ��Ͳ���)��Ƭ�ڣ���FPGA�����IJ�����ɣ�(1)Ԥ������·���������ͼ��������Ӧ����������Ͳ������ڵĻҶȷ��(2)�������������������ڣ�(3)�����ںϵ�·���ں��ڽ����������ڣ�(4)���Ƶ�·������Ƭ��Ƭ������ݴ��估Ƭ�ڵ�·��ʱ��

������Ԥ������·���������ʹ����ںϵ�·�����ڲ�����ˮ���������з�����������ϵͳ�ļ���ƿ�������������������ٶȡ���ˣ�����������Ƴ�Ϊ�ؼ���
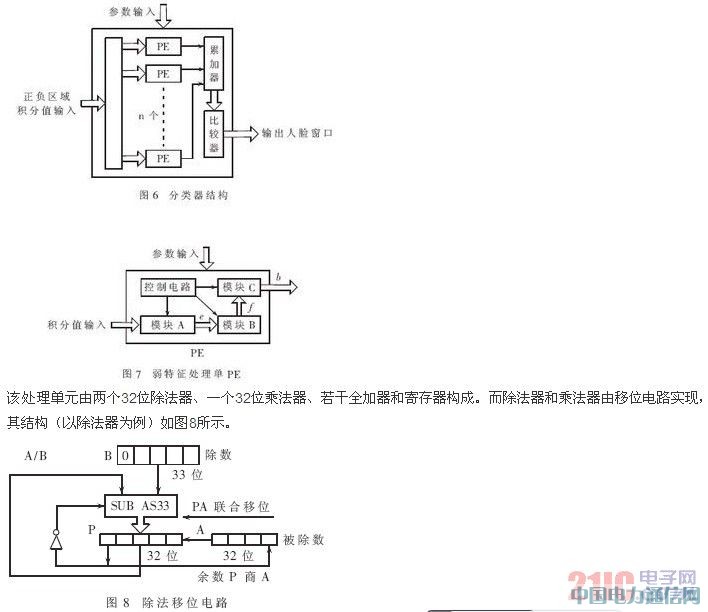
2.1 �������ṹ
������������������������Χ��·���ɣ����ڲ��ṹ��ͼ6��ʾ������ÿһ����������(PE)�ڲ��ṹ��ͼ7��ʾ��PEÿ����ʵ�ֵĹ��ֱܷ��ǣ�ģ��A������ô��ڵ��ṹ����ֵe��ģ��B����һ����������ֵe��f��ģ��C���ó��ô���������ֵb�����Ƶ�·������ģ����ʱ��PE�ڲ����ⲿ�����ݽ�����
�ô�����Ԫ������32λ��������һ��32λ�˷���������ȫ�����ͼĴ������ɡ����������ͳ˷�������λ��·ʵ�֣���ṹ(�Գ�����Ϊ��)��ͼ8��ʾ��
2.2 �������������
������������������������Ƶ�·��ɣ����п��Ƶ�·����ÿһ����������Ƹò�ǿ������������ÿһǿ����������������������
��ѵ���õ�һ������12�㹲294���������ķ���������ˣ�����һ���������ڣ�Ҫͨ��294��������������Ԫ���㡣�ۺϿ���ʱ�����Դ���أ�������������ϲ�ȡһ�δ���������ڣ���ʱ����Ӳ����Դ�ķ�����
ѵ�����õ�n��ǿ��������������������������ͼ9(a)��ʾ��ͨ������������ɵô���ͨ���������n�Ĺ�ϵ��ͼ9(b)��ʾ��
����ͨ������ò�����������������ˣ�������ѡ����һ�δ������ڵ���Ŀ(12)���ɵý�Ϊƽ�����ߣ���ͼ10��ʾ��
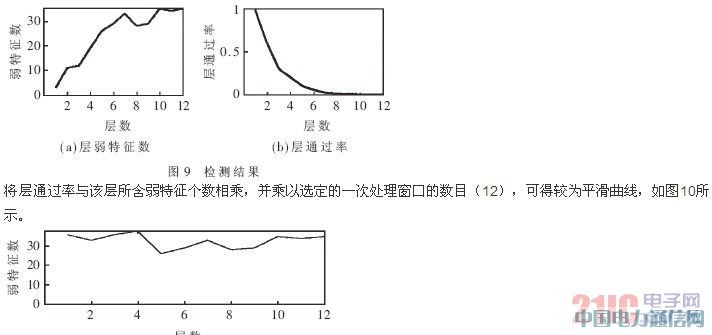
��ͼ9(b)��֪ǰ7��������ѽ���������ķ��������ھܵ�����ˣ�������Ԫ��Ŀ����ǰ������ǿ��������������������ò��������Ĵ������ij˻����ֵ��������ͼ10��֪������Ԫ��ĿΪ38����������ڽ�����Դ������´�������ٶȡ�
���⣬Ϊ����һ��ͬʱ���������ٽ��������ڵĸ��ʣ�����Ԥ�ȸı��˺�ѡ�����������
3 ʵ����
ʵ���Ƕ�CMU-MIT���Կ���еģ���ѵ��ʱ��Ҫѡ�ô�Internet���ռ��õ�������ͼ��1000����ͨ������1 000��ͼ����������ת��ƽ��һ�����ء�������õ�5 000��24×24���ص�����ѵ��������ͬʱ�ռ���1 600����ȻͼƬ��Ϊ������������ѡ����
����ͼ��Ϊ256×256���أ�����Ч����ͼ11��ʾ���Դ�������ͼ������������ӵ�s��1.3��ƽ�����ӵ�d��2.5��������30×30���ص�255×255���ط�Χ�ڵ�����������ϵͳ��VHDL������������1Ϊ����Ӳ����Դ�����
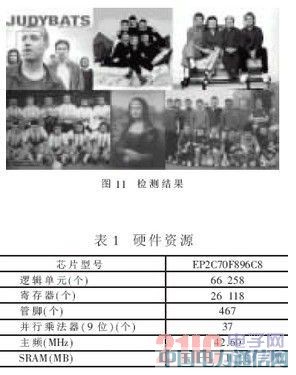
��ƽ�������ٶ�Ϊ17.3fps, �龯�ʵ���5E-7������ʿɴ�0.998��
�����¶�����������ж�����������ʱ������������³���ԣ��Լ�ȥ����Ӱ������ԡ����⣬������Ƶ�����ģ�壬������չ���ṹ�����⣬����ʹ�÷��㣬���Ը�����Ҫѡȡ�������������IJ�����ˮ����������ͼ��ļ�������������㲢�У��������������ȡ�ٶȡ�����Ӳ��ʵ��ʱ����������ѵ������Խ�����ۺ��ٶȺ�Ӳ����Դ��ָ�꣬�ڱ�֤���������ǰ���£�������ŵ�Ӳ���ṹ,�������Ӳ����Դ��