ժҪ�������������������ó��������������ƶ��ɵĴ�����,���ڷǽӴ��Բ�������Ӧ�÷dz��㷺,���߸�������������˵ľ����֪ϵͳ����Ӳ����ƹ���,������λ�������������������������е�Ӧ��,������λ������������뵥Ƭ��ϵͳ��Ӳ����·�ӿں;����������ı��˼·,��ͨ��ʵ��,�ó����������������������Լ��뱻�����巴���֮��Ĺ�ϵ��Ŀǰ���������ĵ�������������ϵͣ����ڲ��߱����ܻ�������ռ�С���ܻ�ӭ�̶ȵ͡����������������������ĸ��ٷ�չ�����ܿ������ķ�չѸ�٣�һЩ���͵������������ʽ�ƶ��������ڲ���ԺУ��ѧ�еõ��ƹ㣬��Ϊ�������������һ�����͵Ļ���һ�廯ϵͳ�����ں����켼������е�����ӡ�����������������˹��������ڶ��Ƚ��������ǽ��й���ѵ������ѧʵ����о�������ƽ̨���ڵ���ѧ��ѧ���������������о���ֵ��
�����������ܻ����˻�ȡ������ݵ�"��֪ϵͳ",�뿪���ܴ������Ļ����˴����Щ���ܵ�һ�����߱�˼ά��������Щ�����ǵ��̻����̶�ʽ�ģ�ʹ����Щ������ֻ�̶ܹ���ijһλ�ð��������趨�������л�еʽ���ظ���������Ӧ�÷�Χ�����ڹ�ҵ�����е��ظ��Թ������������ռ����ƹ㣬�ɼ����ڴ����������ܿ�������ʵ��������˵����ܻ��������в��ɻ�ȱ�����߽�����һ�ֻ��ڳ�����ԭ����λ�������������������߽����������е�Ӧ�ã�ͨ����Ϊ�������ƹ��̽���������������˾������ϵͳ����Ӳ����Ʒ���������λ�����������������ָ���һЩ�ؼ��������������̽�֣������һЩ��̿��Ƽ��ɼ��㷨��
1 Ӳ�����
����"MCU+������+��ʾ�豸+ִ�л���"��������Ʒ�����Ҫ��MCU�ԷǽӴ�ʽ��������ȡ���ⲿ������Ϣ���м���ת�������ó����������������ǰ���ϰ���ľ���ֵ�͵���ʾ�豸��ʾ�������ݳ����趨�ľ�����ֵ���������������ʵ���Զ��������ܣ�ϵͳ�����ͼ��ͼ1��ʾ��
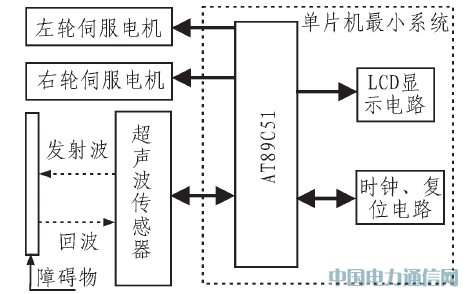
ͼ1 ϵͳӲ����ͼ
����ϵͳMCU����Ŀǰ�Լ۱Ƚϸߵ�AT89C51��Ƭ��������"λ�����������"��Ϊ���봫�������ԷǽӴ�����ʽ����ǰ������ľ��룻��ʾ�豸����LCD1602Һ����ʾģ�飻ִ�л�������PARALLAX��˾������������ת�ŷ���������ŵ��DZ�̿��Ʒ����Ҳ����������������·��ͼ1�г��������������Ĺ���ԭ����ͼ2��ʾ��

ͼ2 ���������������Ĺ���ԭ��
�������������뵥Ƭ��ϵͳ���нӿڹ��ɾ������Ӳ��ϵͳ����ϵͳ�����Ŀ����£���Ƭ����λ��������������͵�һ���������壬λ������������������崥��������һ����40 kHz��������źţ���40 kHz������������ͨ�����������������Ժ�ת���ɻ�е������������Ƶ��Լ��20 kHz���ϣ��ɴ��γ��˳����������źž���"�����"�����������ź��ڿ�������ÿ��Լ1 130Ӣ�ߵ��ٶ����ⷢ���ȥ���������ȥ�ij������ź������ϰ����Ժ�������������������������յ���������ij������źź�ͨ�����ڲ�ת������������������ĵ��������źŽ��зŴͿɵõ�����������źţ��������ź��ٷ��ظ���Ƭ������ʾ�ز���̽�⣬���������Ⱦ��Ƕ�Ӧ�ڱ��ѻ������ص�����������ʱ�䣬��ʱ����ͼ3��ʾ��
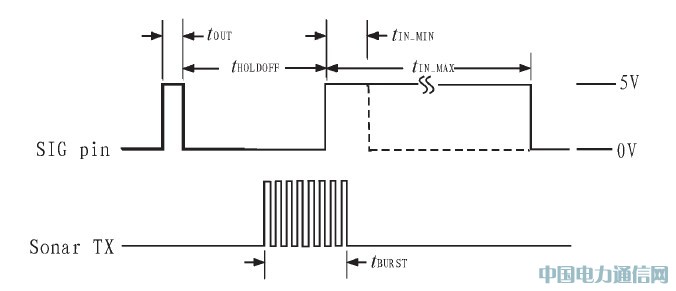
ͼ3 λ���������������ʱ��ͼ
2 �������
2.1 ����ӳ������
����λ�������������ʱ��ԭ��ͼ����C51��Ƭ���ڲ���ʱ/��������̣�ʵ�ֶ�ǰ���������IJ����������������LCDģ������ʾ������ӳ���Ļ�������㷨��������ͼ��ʾ��ͼ4��ʾ��
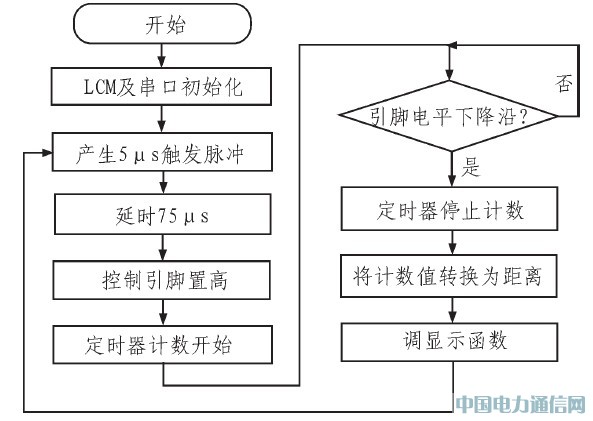
ͼ4 ����ӳ�������ͼ
�������˼·��Ҫ��Ϊ2����
1������λ������������Ŀ���ʱ��ͼ��ͼ3��������λ��������봫��������ͨ����Ƭ����̣������������������ź������ṩһ������ʱ��Ϊ5μs�ĸߵ�ƽ��Ȼ�������ź�����750μs,����λ������������ͱ������������������ѣ����ͬʱ��������Ƭ���Ķ�ʱ����ʼ����������������������ʱ���������������λ������������Ľ������ӵ��ز�ʱ�����Զ��������ź����ŵĵ�ƽ����Ƭ����ѯ�������ŵĵ�ƽ�½��ص���ʱֹͣ��ʱ����������ʱ��ʱ������ֵ�ͼ�ӷ�Ӧ�˳������ӷ��䵽������������ʱ�䡣
2��������ʱ���ļ���ֵ����2,��õ��������������������巵�ص�ʱ�䣬���ݣ�����=�ٶ�×ʱ�䣬�Ϳ��Լ����ǰ������ľ��룬�������ڳ����µĿ��������д������ٶȴ�ԼΪ344 m/s,��29.034μs�������ܴ���1 cm,������ʱ�ڳ����������x=count/29.034���������ֵ����ñ������ֵ����LCD��ʾ����������ֵ��LCDģ������ʾ������
2.2 �����������������
����λ��������봫������õ�"����"��Ϣ���������������������ʵ�ֱ������ߡ�������������˾���ǰ���ϰ���С��20 cmʱ����������ոı��н���������������ײ�������Ҫ�����Գ�������������Ļ������˼·����������㷨������ͼ��ʾ��ͼ5��ʾ��
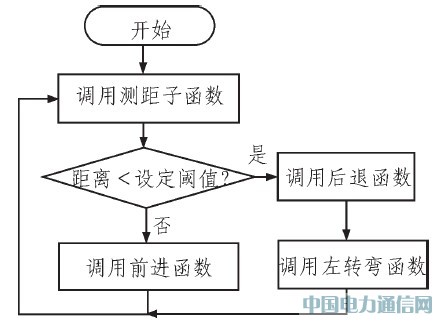
ͼ5 ������������������ͼ
����ͨ���������ó���������ӳ���ȡ�����������ǰ����������ľ���ֵ���жϾ����Ƿ����趨��ֵ���ڣ������ڳ����趨�ľ�����ֵ�����ú���Forward���������������������ǰ������С�ڳ����趨�ľ�����ֵ������Backward��������������������˺���һ�ξ��룻�����ֵ���Left_Turn�����������������������պ�����ٷ����ظ����Ϲ��̡�
3 ϵͳ����
3.1 Ӳ��ϵͳ�ĵ���
Ӳ��ϵͳ�������������Լ��������̼������£����ȸ���Ӳ�����ԭ��ͼ������Protel DXP2004�����������ֺͲ��ߣ���Ƴ�����������˵Ŀ�����PCB,Ȼ�����ư��豸������PCB���壻����Ԫ�����嵥����PCB�ϰ�װ���Ӻ�Ԫ���������Ӻ�ֱ���ŷ�������������������ص�������߿������ĵ�Ƭ���洢������ͨ��Դ�������У���ʾ�������Թ۲�������ĵ�Ƭ����Сϵͳ����ʱ�ؼ����źŲ����Ƿ�������
3.2 ϵͳ�������
���������������˼·����Keil C���뻷������C���Ա�д������룬����������ɵ�HEX�ļ���д�����ư��ϵĵ�Ƭ������洢�����������У�����������˰������趨����ģʽǰ������ǰ��������ʱ����LCD��ʾ����ʵʱȷ����ʾ��С����ǰ������֮��ľ���ֵ����С����ǰ������С�ڳ����趨�ľ�����ֵʱ��С����ת�������ǰ����������ʵ�������λ��������봫��������������²��ܾ�ȷ�ز������룬��ͼ6��ʾ��
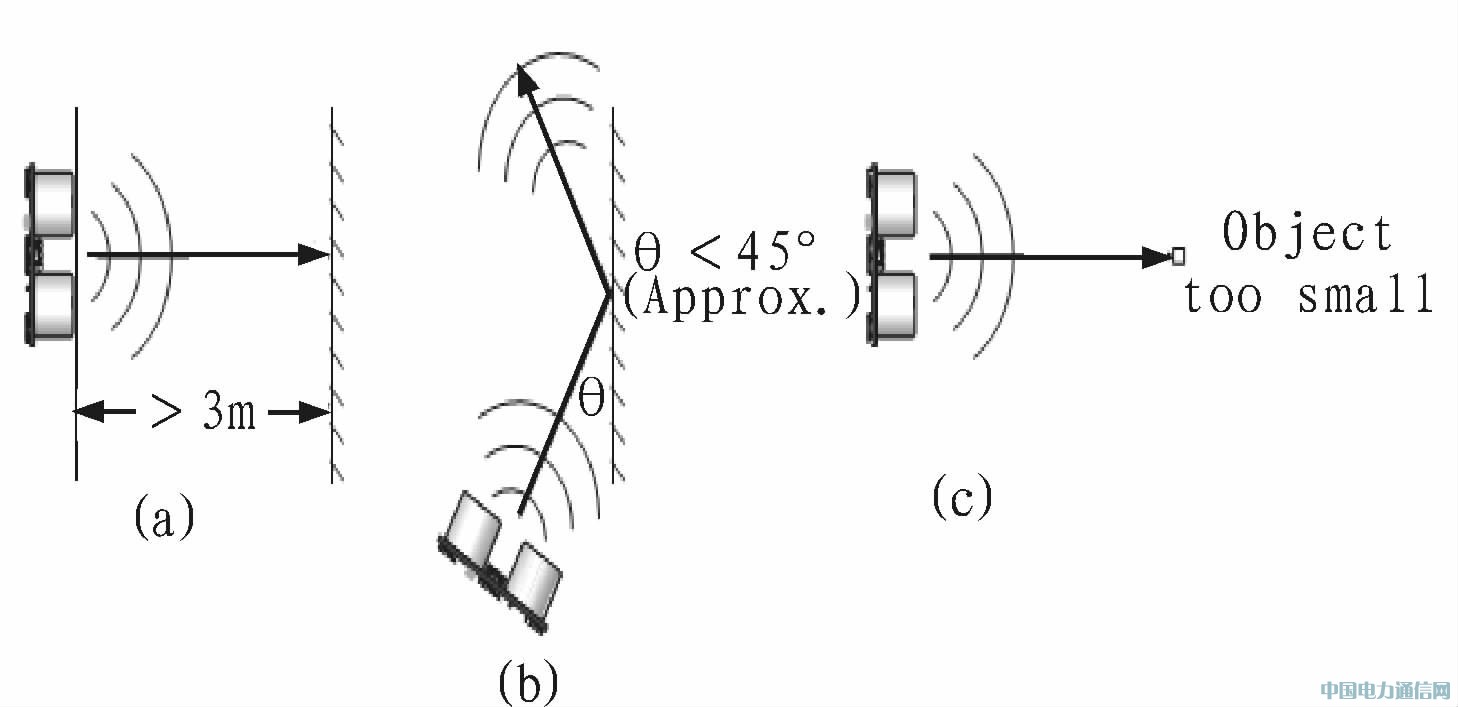
ͼ6 λ��������봫�������ܾ�ȷ�������������
1��������������3 m������������������������3 m֮��ʱ����ͼ6��a����ʾ����λ������������ķ��书�ʲ���������������ź�̫��������LCD����ʾ���ľ���ֵ���ܷ�ӳʵ�ʾ���ֵ��
2���������岻����ǰ�� ���������岻���������������ǰ������ͼ6��b����ʾ��������һ����ƫ�ǣ���������ı����γɵķ���Ƕ�̫С��ʹ���������������ղ�������������źţ�����LCD����ʾ���ľ���ֵ���ܷ�ӳʵ�ʾ���ֵ��
3��ǰ��������������̫С ��ǰ�������������̫С���Ǻ����̫С����ͼ6��c����ʾ����Ϊû���㹻ǿ�ȵ��źŷ��ص�������������LCD����ʾ���ľ���ֵ���ܷ�ӳʵ�ʾ���ֵ��
4 ������
�������������ڷǽӴ��Բ��������Ӧ�÷dz��㷺�������ڼ��Һ��ˮλ���ر��Ǿ��и�ʴ�Ե�Һ�壬�����ᡢ����Һ�壩������������ײϵͳ����������ǽ�����̽�ˣ������˸�֪ϵͳ��Ƶȣ�����λ�������������51��Ƭ����������������˵�"�����֪ϵͳ",���е�·�ӿڼ��ɱ��������ȶ��Ժõ��ص㣬������������ܵ�λ������������������������Լ��뱻�����巴��ǵȵ����ơ�