�Ź�
�Ӳ��� 747 �ͻ��ĵ���������������ʻÿ�춼��ʹ�õ� GPS ����ϵͳ����Ѱ����Ҫ�ҵ������ɭ��ij���ı��أ�GPS �����Ѿ�Ѹ�������ڶ���Ӧ���С�
�������¼����������� GPS ������Ч�ܵ�ͬʱ����صļ���������Խ��Խ������ʱ�����գ����������ɽ��� GPS ���Σ��Ծ�ȷ����ʵ�ʵ�Ѷ�š�����֮�⣬�������������������Ŀǰ������ PXI �ǿع��ܣ��Լ�¼������ʵʱ�� GPS Ѷ�š�
����
���� GPS ��������һ�������г����ռ�����˶�����ƾ�����������������ԣ��磺
1)���ͺĵ���
2)��Ѱ����������Ѷ��
3)�Ͽ��ߢȡ����
4)����ȷ�Ķ�λ����
����Ӧ��˵���������˽���ж��� GPS ����������ķ��������жȡ�����ϵ������λ��ȷ�ȡ��״ζ�λʱ�䣬��λ������ƪ�����ļ���Ҫ���ù���ʦ�����˽� GPS �����⼼�����Ըտ�ʼ�Ӵ� GPS ������������ҵ�Ĺ���ʦ��˵���ɶԳ�����������ҵ��֪һ����������ʦ�Ѿ��� GPS �������ؾ��飬�������ƪ�����ļ������˽��µ��ǿؼ�������ƪӦ��˵������Ϊ�����������䣺
GPS �����Ļ��� GPS ����ϵͳ �����������
a.���ж�
b.�״ζ�λʱ�� (TTFF)
c.��λ��ȷ�����ظ���
d.�پ�ȷ�����ظ���
ÿ����������ṩ����ʵ���ؾ��뼼�ɡ�����Ҫ���ǣ����߿ɽ��Լ��Ľ���� GPS ��������õĽ�����бȽϡ����Լ��Ľ�����������Ľ�����ٴ�����������Ľ�������ɽ�һ�������Լ����������ݡ�
GPS ����ϵͳ����
ȫ��λϵͳ (GPS) Ϊ�ռ�ܹ������ߵ絼��ϵͳ�����������վ����з�����Ȼ GPS ԭ�ǿ�����Ϊ���¶�λϵͳ֮�ã�ȴҲ����������ҪӰ�졣��ʵ�ϣ���Ŀǰ�Ϳ����ڳ����������������ƶ��绰��ʹ�� GPS ��������GPS ����ϵͳ������ 24 �����ǣ����� L1 �� L2 Ƶ�� (Band) ���ж���Ѷ�ŵĴ��䡣�� 1.57542 GHz �� L1 Ƶ�����������Ǿ����� 1.023 Mchips BPSK (��������λ����) ��չƵѶ�š�չƵ������ʹ�ó�Ϊ C/A (coarse acquisition) ������������ (PN) ���С���ȻչƵ����Ϊ 1.023 Mchips����ʵ�ʵ�Ѷ�����ݴ�����Ϊ 50 Hz [1]����ϵͳ��ԭʼ������ҵ�У�һ�� GPS �������ɴ� 20 ~ 30 �������ϵľ�ȷ�����������������������������ȫ���������ӵ����Ƶ��������¡�Ȼ�����˳�Ϊѡ���Կɿ��� (Selective availability) ���Ѷ��Դ������ 2000 �� 5 �� 2 ��ȡ�����ڽ��죬����������������� 5 ���ߣ���һ������ѽ��� 1 ~ 2 ���ߡ�
������ L1 �� L2 (1.2276 GHz) Ƶ����GPS ���Ǿ��������ν�ġ�P �롹����Ѷ�š���Ѷ��Ϊ 10.23 Mbps BPSK �ĵ���Ѷ�ţ���ʹ�� PN ������ΪչƵ�롣�������� P ��Ĵ��䣬���и���ȷ�Ķ�λ��ҵ���� L1 Ƶ���У�P ������ C/A ����з���λ (Out of phase) �� 90 �ȴ��䣬��ȷ��������ͬ�ز��ϲ�ô� 2 ��Ѷ���� [2]��P ���� L1 Ƶ���пɴ� -163 dBW ��Ѷ�Ź��ʣ��� L2 Ƶ���пɴ� -166 dBW�������˵�����ڵ������� C/A �룬����� L1 Ƶ���дﵽ��С -160 dBW�Ĺ㲥���ʡ�
GPS ����Ѷ��
��� C/A ����˵������Ѷ���������ݵ� 25 �����(Frame) �����ɣ���ÿ���������� 1500 ��λ [2]�����⣬ÿ���ܾ��ɷ�Ϊ 5 �� 300 ��λ���ӿ�ܡ���������ߢȡ C/A ��ʱ�����ķ� 6 ����ߢȡ 1 ���ӿ�ܣ��༴ 1 ����ܱ���ķ� 30 ���ӡ���ע�⣬��ʵijЩ��Ϊ�����������ҵ�����п����������� 30 ������ߢȡ������ܣ����ǽ����Ժ�����֮����ʵ�ϣ�30 ���ӽ�Ϊߢȡ������ܵ�ƽ�����ʱ�䣻ϵͳ���״ζ�λʱ�� (TTFF) �������� 30 ���ӡ�
Ϊ�˽��ж�λ��ҵ��������Ľ���������������������� (Almanac) �������� (Ephemeris) ����Ϣ���ñ���Ϣ�����������������������Ѷ�������У�����ÿ���ӿ�������ר������Ϣ����һ����˵�����ǿ����ӿ�ܵ���𣬽�����ʶ����������������Ϣ [2][7]��
Sub-frame 1������ʱ������ (Clock correction)����ȷ�ȣ����������ǵ���������
Sub-frame 2-3��������ȷ�Ĺ���������ɼ������ǵ�ȷʵλ��
Sub-frames 4-5���������Ե����ǹ�����ݡ�ʱ����������������Ϣ��
����������������������������������Ϣ�����ܹ����ж�λ��ҵ��һ���õ��������ǵ�ȷʵ���룬��߽� GPS ���������������DZ���ʽ (Triangulation algorithm) �ش�λ����Ϣ����ʵ�ϣ���������������� (Pseudorange) ������λ�õ���Ϣ�������ý�������ȷʶ����λ�á�
������ʹ�� C/A ��� P �룬��������������� 4 ���������ǣ����� 3D ��λ�����������ǵĹ��̼�Ϊ���ӣ���������˵�����ǽ���������ÿ�����ǵľ��룬������Լ���λ�á�����Ѷ�����Թ��� (c)����Ϊ 299,792,458 m/s �н�����˽������������е�ʽ���������������֮��ľ��룬����Ϊ��������� (Pseudorange)����

��ʽ 1.��������� (Psedorange)��Ϊʱ���� (Time interval) �ĺ�ʽ [1][4]
���������뽫���������͵�Ѷ�����ݽ������룬���ܹ���ö�λ��Ϣ��ÿ�����Ǿ������λ�ý��й㲥 (Broadcasting)��������������ÿ������֮������������죬�Ծ����Լ���ȷʵλ�� [8]����������ʹ�õ��������ⷨ (Triangulation)������ 3 �����ǽ��� 2D ��λ��4 ��������ɽ��� 3D ��λ��
�趨 GPS ����ϵͳ
���� GPS ����������Ҫ��Ʒ��Ϊ 1 ��ɷ��� GPS Ѷ�ŵ� RF ����Ѷ�Ų��������ڴ�Ӧ��˵���У����߽����˽�Ӧ���ʹ�� NI PXI-5671 �� NI PXIe-5672 RF ����Ѷ�Ų��������Դﵽ����Ŀ�ġ��˲�Ʒ���ɴ��� NI GPS �����飬��ģ�� 1 ~ 12 �� GPS �������ǡ�
������ GPS ����ϵͳ��Ӧ�������ֲ�ͬ������Դ����Ч�ܡ�������˵����ӵĹ̶�ʽ˥���� (Attenuator)�����������ʾ�ȷ���������� (Noise floor) ��Ч�ܡ����⣬���ݽ������Ƿ�֧����ֱ�����벺�� DC ƫѹ (Bias)��ijЩ�������������Ҫ DC ����� (Blocker)����ͼ��Ϊ GPS Ѷ�Ų���������ϵͳ��
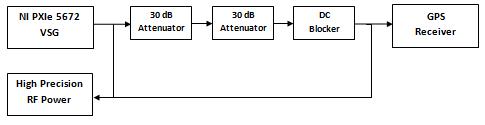
ͼ 1. GPS ����ϵͳ�ij���ͼ
��ͼ 1 ��ʾ�������� GPS ������ʱ������������� 60 dB ����� RF ˥�� (���ף�Padding)���̶�ʽ˥�������ٿ��ṩ����ϵͳ 2 ���ŵ㡣���ȣ��̶�ʽ˥������ȷ�����Լ�������������� -174 dBm/Hz ���������� (Thermal noise floor)����Σ����ڿ����߾�ȷ�� RF ���ʼ� (Power meter) УѶ��λ����˹̶�ʽ˥��������������ʾ�ȷ�ȡ���Ȼ���� 20 dB ��˥�����ɷ����������Ҫ����ʹ�� 60 ~ 70 dB ��˥������ɴﵽ���ߵĹ��ʾ�ȷ����������Ч�ܡ��Ժ������� RF ����У����ͼ 2 ����˵��˥����������Ч������ɵ�Ӱ�졣

ͼ 2. ��ͬ˥��������������ʱȽ�
��ͼ 2 ��ʾ��˥�������ڼ������������������� -174 dBm/Hz ���������㡣
RF ����Ѷ�Ų�����
��ѡ�� RF ����Ѷ�Ų�����ʱ��NI LabVIEW GPS �������ͬʱ֧�� NI PXI-5671 �� NI PXIe-5672 RF ����Ѷ�Ų���������Ȼ�� 2 �����俨�ɲ��� GPS Ѷ�ţ������� PCI Express �����ٶȽϿ죬�������̽��� IF �Ȼ� (Equalization)����� NI PXIe-5672 ����Ѷ�Ų��������ܵ��������� 2 �����俨������ 6 MB/s �����ݴ������� 1.5 MS/s (IQ) ȡ���ʣ��ɴӴ��̴��� GPS ���Ρ�
��Ȼ PXI������Ӳ�̿�����ά�ִ����ݴ����ʣ�NI �Խ���ʹ����Ӵ��̽��ж���Ĵ�����������ͼΪ���� NI PXIe-5672 �ij��� PXI ϵͳ��

ͼ 3. ���� NI PXIe 5672 VSG �� NI PXI-5661 VSA �� PXI ϵͳ
GPS �����������������Ѷ���ڼ䣬����� 12.5 ���� (25 �����) �IJ��Ρ��� 6 MB/s ��ȡ���ʣ������ԼΪ 7.5 GB�����������IJ��ε����ߴ磬���еIJ��ξ��ɴ����ڶ��Ӳ��ѡ��֮һ����Щ���δ�����Դѡ�������
oPXI ��������Ӳ�� (�Ƽ�ʹ�� 120 GB Ӳ������)
o�� HDD 8263 �� HDD 8264 ����� RAID װ��
o��� USB 2.0 Ӳ�� (���� Western Digital Passport Ӳ�̽��в���)
��������Ӳ���趨������֧�ֳ��� 20 MB/s ���������ݴ�����ҵ����ˣ��κδ���ѡ����ɷ��� GPS Ѷ�ţ������м�¼�벥�š����Ժ�Ķ����У���˵���������¼ GPS ���ε�������ҵ�������� GPS ������Ч�ܵ����Բ������� (Characterization) ��ҵ��
��������� GPS Ѷ��
���� GPS �������������ߴ������ݣ���ȡ������������������Ϣ����Ȼ������� GPS Ѷ������Ҫ������Ϣ������������������Ϣ�������ı��ļ���ʾ�����ṩ����λ�á����Ǹ߶ȡ�����״̬�������й���������Ϣ�����⣬�ڽ������εĹ�����M�������ѡ����Ʋ�����������ʱ�� (TOW)��λ�� (���ȡ�γ�ȡ��߶�)�������Ľ��������ʡ��Դ���ϢΪ�����������齫�Զ�ѡ����� 12 ���������ǡ��������еĶ�����λ�� (Doppler shift) ��������� (Pseudorange) ��Ϣ�������Ų�������Ļ�Ƶ���Ρ�Ϊ�˿ɾ������ţ������鰲װ��������������������������������������⣬������������վֱ�����أ�
·Almanac information (The Navigation Center of Excellence) http://navcen.uscg.gov/gps/almanacs.htm
·Ephemeris information (NASA Goddard Space Flight Center) http://cddis.gsfc.nasa.gov/gnss_datasum.html#brdc
�����Ƶ������������������������ɽ����ض�������ʱ��� GPS Ѷ�ţ������ɻ���������ǰ����ע�⣬��ѡ����Щ����ʱ������ѡ�����������Ӧ�ĵ�����һ����˵������������������ϢΪÿ�ո��£���˵�ѡ���ض�ʱ��������ʱ����Ӧѡ��ͬ 1 ��ĵ��������ص�������������Ϊѹ���ġ�*.Z����ʽ����ˣ��ڴ���ʹ�� GPS ������֮ǰ�������������н�ѹ����
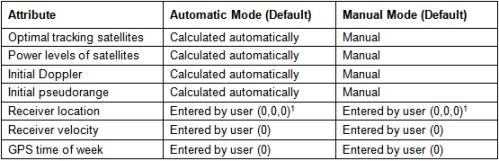
ֻҪʹ�ù������еġ��Զ�ģʽ (Automatic mode)������������������� GPS ģ����ҵ��������������Ƶķ�ʽ�����㶼���������������Ϣ����Ȼ���˹������ṩ�ֶ�ģʽ�����ֶ�ģʽ (Manual mode) �У�ʹ���߿ɸ���ָ��ÿ���������ǵ���Ϣ��ͼ 4 ����ʾ�� 2 ����ҵģʽ���ṩ�����������
����1LLA (longitude, latitude, altitude)
ͼ 4. GPS �������Զ����ֶ�ģʽ��Ĭ��ֵ
��ע�⣬�����齫������ָ���������������ڿ��ܵ���ֵ��Χ��ǿ���趨 GPS �� TOW����ˣ���ѡ�����ֵ���������������ķ�Χ�������齫�Զ��趨Ϊ��ӽ�����ֵ������ʹ���ߡ���niGPS Write Waveform To File���������ɽ��� GPS ��Ƶ���� (�Զ�ģʽ)�������˻��ӿڼ�����ͼ��ʾ��

ͼ 5. �ķ������ɽ��� GPS ���Բ��Ρ�
��ע�⣬ijЩ�ض�������ҵ���������û������� GPS ���Ե��ļ����͡�������˵����������������ж�ʱ�������浥һ�������ǡ���һ������˵����Ҫ��λ��ҵ������ (�� TTFF ��λ�þ�ȷ��)����ʹ�õ� GPS Ѷ�Ž���������������ǡ�������������NI GPS ������������ķ�������ͬʱ������λ����������Ƿ��湦�ܡ�
��¼�����е� GPS Ѷ��
���� GPS ����ʱ��������������ձ�ķ�ʽ������ֱ�Ӵӿ�����ߢȡ֮���ڴ˲����У�����ʹ������Ѷ�ŷ����� (�� NI PXI 5661) ��¼Ѷ�ţ���������Ѷ�Ų����� (�� NI PXIe-5672) �����Ѽ�¼��Ѷ�š������ڼ�¼ GPS Ѷ��ʱ�����ߢȡʵ�ʵ�Ѷ�ż��� (Impairments)������ڲ���Ѷ��ʱ���ɽ�һ���˽�������ڲ����е���ҵ���Ρ�
ֻҪ����Ϊֱ�ӵķ�ʽ������ߢȡ�����е� GPS Ѷ�š��� RF ��¼ϵͳ�У����ǽ��ʺϵ�������Ŵ���������ʹ�� PXI ����Ѷ�ŷ�������Ӳ�̣���ߢȡ���ɴ�����Сʱ���������ݡ�������˵��1 �� 2 TB �� RAID �������У����ɼ�¼��� 25 ��Сʱ�� GPS ���Ρ����ڴ�ƪ�����ļ����������۴��������⼼�����������Ҫ��ط���������룬������http://www.ni.com/streaming/rf�������ж��䣬�����˽�Ӧ������ RF ��¼�벥��ϵͳ���趨���ʵ� RF ǰ�ˡ�
��ͬ���͵�����ͨ��Ѷ�ţ�����Ҫ��ͬ�Ĵ���������Ƶ�ʣ������档�� GPS Ѷ����˵������ϵͳ�������� 1.57542 GHz ������Ƶ�ʣ���¼ 2.046 MHz �� RF ���������˴����������ٱ���ﵽ 2.5 MS/s (1.25 x 2 MHz) ȡ���ʡ�ע�⣺�˴��� 1.25 �������Ǹ��� PXI-5661 ���ֽ�ת���� (DDC) �ڽ�Ƶ (Decimation) �ε��½� (Roll-off) �˲������ó���
���·�˵���IJ�����ҵ�У�����ʹ�� 5 MS/s (20 MB/s) ȡ������ߢȡ�����Ĵ��������ڱ� PXI ������Ӳ�̼��ɴﵽ 20 MB/s ����ߵ�������������˲���ʹ����ӵ� RAID ��ɽ� GPS Ѷ�Ŵ��������̡�Ȼ�������� 2 �����ɣ������Խ���ʹ�����Ӳ�̡����ȣ����Ӳ�̿�������������ݴ�����������¼���鲨�Ρ���Σ����Ӳ�̲���� PXI ��������Ӳ����ɶ��⸺�������·�˵���IJ�����ҵ�У����Dz��� 1 �� USB 2.0 �����Ӳ�̡���Ӳ��Ϊ 320 GB �� Western Digital Passport������ 5400 RPM ��Ӳ��ת�١������ǵIJ�����ҵ�У�һ���ȡ�ٶ�Լ���� 25 ~ 28 MB/s����˸ÿ�Ӳ�̿�ͬʱ���� GPS �������ݴ����ķ��� (6 MB/s) ���¼ (20 MB/s) ��ҵ��
GPS Ѷ�ż�¼��ҵ��Ϊ����֮��������ѡ���趨���ʵ�������������Ŵ��� (LNA)����һ�㱻��ʽƽ������ (Passive patch antenna)�������� L1 GPS Ƶ���з��ֽ��� -120 ~ -110 dBm �ij�����ֵ���� (�˴�Ϊ -116 dBm)������ GPS Ѷ�ŵĹ���ǿ�ȼ�С����˱�����зŴ���ҵ����ʹ����Ѷ�ŷ�������ߢȡ����Ѷ�ŵ�������̬��Χ����Ȼ�ж�������ɽ����ʵ�����ǿ��������Ѷ�ţ��������Ƿ��֣���ʹ������ʽ GPS ���ߴ��� NI PXI-5690 ǰ�÷Ŵ��� (Pre-amplifier) ʱ�����ɴﵽ���Ч���������� 2 ����ɴ� 30 dB ����� LNA������������ɴﵽ 60 dB (30 + 30)����ˣ�����Ѷ�ŷ������ɲ�õķ�ֵ���ʣ����� -116 dBm ������ -56 dBm����ͼ��Ϊ�����趨�ķ���ϵͳ��
ͼ 6. GPS �������봮���� LNA��
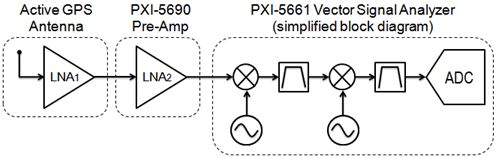
��ע�⣬��¼����ϵͳ�ıر����֮һ����Ϊ����ʽ GPS ���ߡ�����ʽ (Active) GPS ���ߣ����� 1 ��ƽ�������� 1 �� LNA���˿�����һ�����Ҫ 2.5V ~ 5V �� DC ƫѹ��ѹ��������Լ $20 ���ɹ����ֳɲ�Ʒ��Ϊ�˼����������ʹ�� 1 �����ߴ��� 1 �� SMA ��ͷ�����ǽ������ж����п������� RF ǰ�˵ĵ�һ�� LNA ����ͼ�μ�Ϊ��Ҫ����ͼ�ν���ȷ�Ͻ��м�¼��ҵ���ǿأ��Ƿ������Ѷ�Ź����������������ע�⣬ͼ 6 �е�����Ѷ�ŷ�����Ϊ��ͼ�ꡣʵ�ʵ� PXI-5661 Ϊ 3 ��ʽ����� (Super-heterodyne) ����Ѷ�ŷ��������ϸ�����ͼ����ʾ��
���� 60 dB ����������Ѷ���У������ L1 �еõ�Լ -60 ~ -50 dBm �ķ�ֵ���ʡ�����ɨƵ (Swept spectrum) ģʽ�趨 VSA ����������Ƶ�ף����ཫ���� L1 Ƶ�� (FM ���ƶ��绰)֮��Ĵ��й��� (Power in band)����ǿ�Ƚ����� GPS Ѷ�š�Ȼ�������� (Out-of-band) Ѷ�ŵķ�ֵ����һ������ᳬ�� -20 dBm���ҽ��� VSA �Ķ����ͨ (Band pass) �˲���֮һ�����˲���ҵ����Ҫ���Ӽ�¼װ�õ� RF ǰ���Ƿ�ﵽӦ��Ч�ʣ���ķ���֮һ��Ϊ���� RFSA ʾ�����ķ����������˳������� L1 GPS Ƶ���г��� RF Ƶ�ס�ͼ 7 ��Ϊ������Ƶ�ס���ע�⣬��Ƶ��ͼ���� GPS ����Ƶ�����������á�����ʽ GPS ������ PXI-5690 ǰ�÷Ŵ������ɴﵽ 60 dB �������档
����Ƶ�ʣ�1.57542 GHz
չƵ (Span)��4 MHz
RBW��10 Hz
ƽ����RMS��20 Averages

ͼ 7. ������С�ķֱ��ʴ��� (RBW)���ſ���Ƶ���г��� GPS
�˴�ʹ��ǰ�����ᵽ�� RF ��¼�벥�� LabVIEW ���������趨 -50 dBm �IJο�λ��1.57542 GHz ����Ƶ�ʣ��� 5 MS/s �� IQ ȡ���ʡ���ͼ����ʾ���÷������˻��ӿڣ�
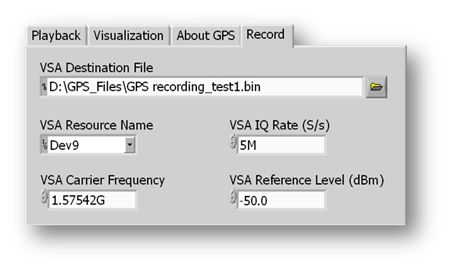
ͼ 8. RF ��¼�벥�ŷ������˻��ӿڡ�
GPS Ѷ�ŵ����¼ʱ�䣬������ȡ���������������������ʹ�� 2 TB ������ Raid �������� (Windows XP ��֧�ֵ�������)�������� 5 MS/s ȡ���ʼ�¼��� 25 ��Сʱ��Ѷ�š�
�趨 RF ǰ��
���ڴ����� LNA ���ṩ 60 dB �����棬���ʹ���߿ɴ����������Ѷ�ŷ�����ǰ�˵Ĺ��ʡ������ǵ�������ҵ�У�60 dB �����漴���Խ���ֵ���ʴ� -116 dBm ������ -56 dBm������ 60 dB ������ (�� 1.5 dB ������ϵ��)��Ѷ�ŵ��������ʽ�Ϊ –112 dBm/Hz (-174 + ���� + F)����ˣ�����ߢȡ����Ѷ��� (SNR) ��߿ɴ� 56.5 dB (-56 dBm +112.5 dBm)�������ʵ�ʵ�������̬��Χ���ɴ˿�֪������ 80 dB �Ķ�̬��Χ���� VSA ���ɼ�¼���� SNR���Ҳ���������Ѷ�ŵ�����Ӱ�졣
��Ҫ��¼�κ�����Ѷ��ʱ���ɽ��ο�λ�趨�߳�һ���ֵ�������� 5 dB������Ӧ�κ�Ѷ��ǿ�ȵ��쳣������ijЩ����£���Ȼ�����˲��轫���� VSA ����Ч��̬��Χ���� GPS Ѷ��ȴ�����ܵ�Ӱ�졣���� GPS Ѷ�������������������� SNR ��Ϊ 58 dB (-116 + 174)��������� VSA ��¼���� 58 dB �Ķ�̬��Χ�����κ����塣��ˣ������������ԡ������������Ķ�̬��Χ�� 10 dB ���ϣ����Ӱ���¼Ѷ�ŵ����� (�ڴ˴����У�PXI-5661 ���ṩ���� 75 dB �Ķ�̬��Χ)��
���ڱ����趨���ʵIJο�λ���ʵ��趨��¼װ�õ� RF ǰ�����Ե�ͬ����Ҫ������ǰ���ᣬ��Ҫ�����ѵ� RF ��¼���ݣ�����ʹ������ʽ GPS ���ߡ���������ʽ�����ڽ� LNA���Ե�����ϵ���ṩ��� 30 dB �����棬�����ɹ�Ӧ DC ƫѹ���·�������˵������ƫѹ��ʽ��
���� 1���� GPS ���������й��������ʽ����
��һ������������ DC ƫѹ��T������������ʽ���ߡ��ڴ˷����У����ǽ� DC Ѷ�� (��Ϊ 3.3 V) ������ƫѹ��T����DC �����ҡ�T���ֽ����ʵ� DC ƫ������������ʽ���ߡ���ע�⣬�˴�����������ʽ���ߵ� DC ���������������Ƿ����þ�ȷ�� DC ��ѹ����ͼ��˵������������Ρ�
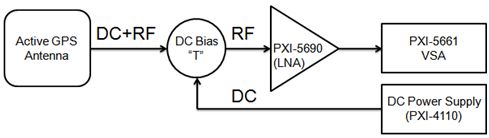
ͼ 9. ʹ�� DC ƫѹ��T������������ʽ GPS ����
��ͼ 9 �пɷ��֣�PXI-4110 �ɳ��� DC ��Դ��Ӧ�������ɹ�Ӧ DC ƫѹѶ�š���Ȼ����ֳɵĵ�Դ��Ӧ�� (�����������λ�ϵ͵���Դ��Ӧ��) �������ڴ�Ӧ���У����ǻ���ʹ�� PXI-4110 �Լ���ҵ��ͬ���ģ����г�����ƫѹ�� (Bias tee) �ɽ������ 1.58 GHz ����ҵ�����˴���ʹ�õ�ƫѹ�������� www.minicircuits.com��
���� 2���Խ���������������ʽ����
����������ʽ GPS ���ߵĵڶ������������������߱����Ľ���������������ֳ� GPS ����������ʹ�õ�һ�˿ڹ���������ʽ GPS ���ߣ��Ҵ˶˿��������ʵ� DC Ѷ�Ŵﵽƫѹ����������ʽ GPS ���������Ϸ����� (Splitter) �� DC ����� (Blocker)�����ɹ���������ʽ LNA��������¼ GPS ����������õ�Ѷ�š���ͼ��Ϊ��ȷ�����᷽ʽ��
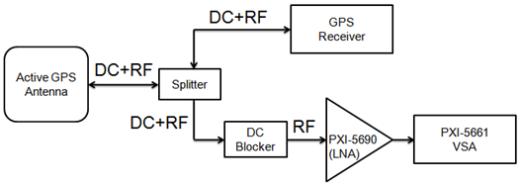
ͼ 10. �� DC ����� (Blocker)�����ɼ�¼������ GPS Ѷ��
��ͼ 10 ��ʾ��GPS �������� DC ƫѹ�����Թ����� LNA����ע�⣬���ڵ����м�¼ʱ�����ɹ۲��������������ԣ����ٶ��뾫ȷ��˥�� (Dilution) ���Σ���˷��� 2 �ر�����������������ԡ�
����ʽ (Noise figure) ����ϵ������
��Ҫ�����Ѽ�¼ GPS Ѷ�ŵ�����������ֻҪ�ҳ����� RF ǰ�˵�����ϵ�����ɡ���һ�������˵������ϵͳ������ϵ���������ܵ�ϵͳ�ĵ�һ��Ŵ�����Ӱ�졣������ RF �����ϵͳ�У�����ϵ��������Ϊ SNRin�� SNRout(���ģ����⼼��������ϵ��) �ı���������¼ GPS Ѷ��ʱ���������ҳ����� RF ǰ�˵�����ϵ����
��ִ�д���ʽ����ϵ������ʱ�������������ÿ������ϵ�������棬��֮ת��Ϊ���Ե�ʽ������ν�ġ��������� (Noise factor)�������Դ����� RF �������ϵͳ������ϵ��ʱ���������ҳ�ϵͳ���������ӣ�������ת��Ϊ����ϵ�������ϵͳ������ϵ������ʹ�����е�ʽ����֮��

������ʽ 2. ����ʽ RF �Ŵ���������ϵ��������ҵ [3]
��ע�⣬������������ (nf) ������ (g) �������Թ�ϵ���Ƕ��� (Logarithmic) ��ϵ�������Сд��ʾ֮�����м�Ϊ����������ϵ����������ת��Ϊ���� (��֮��Ȼ) �ĵ�ʽ��




������ʽ 3 ����ʽ 6. ����������ϵ��������/����ת�� [3]
�ڽ��������Ŵ��� (LNA) ������ʽ GPS ���ߣ�һ����ṩ 30 dB �����棬��������ϵ��ԼΪ 1.5 dB�����ǿؼ�¼��ҵ�ĵڶ��Σ����� NI PXI-5690 �ṩ 30 dB �ĸ������档����������ϵ���ϸ� (5 dB)����˵ڶ���Ŵ�������������С��������ϵͳ�С��ڽ�ѧʵ���У�����Լ�¼�ǿ���ҵ������ RF ǰ�ˣ�ʹ�õ�ʽ 2 �������������ӡ�����������ϵ��ֵ������ͼ��ʾ��

ͼ 11. RF ǰ�˵��� 2 ���������ϵ�������ӡ�
�������м��㣬�����ҳ��������������������ӣ�

������ʽ 7. RF ��¼ϵͳ�Ĵ�������ϵ��
��Ҫ����������ת��Ϊ����ϵ�� (��λΪ dB)��������õ�ʽ 3 �Ի�����н����

������ʽ 8. ��һ�� LNA ������ϵ����Ӱ�������������ϵ��
���ʽ 8 ��ʾ����һ�� LNA (1.5 dB) ������ϵ������Ӱ����������ϵͳ������ϵ������ VSA ������趨����������������ˮƽ (Noise floor) �������뼤��������ˮƽ������û������еļ�¼��ҵ������������Ѷ����� 1.507 dB ��������
�� GPS ����������Ѷ��
���ڶ���������ʹ�ú��ʵ����������û������羭����γ�ȵ���Ϣ�������Ҫ�������ķ�ʽ�����Զ�������ҵ�����ã�Ŀǰ�ж�������������������֪�� NMEA-183 Э�飬���趨�� PXI ����������Ѷ�š����һ�������������������л� USB �����ߣ������������ָ��� NI LabVIEW �У����е�ָ�����ת������Իش������붨λ��Ϣ��NMEA-183 Э���֧�� 6 �ֻ���ָ������Դ���ר������Ϣ����Щָ����±���ʾ��
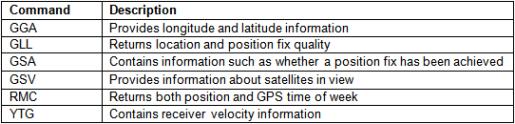
ͼ 12. ���� NMEA-183 ָ�����
��ʵ�ʲ�����Ҫ���ԣ�GGA��GSA���� GSV ָ��Ӧ��Ϊʵ�á���ֵ��һ����ǣ�GSA ָ�����Ϣ�������˽�������Ƿ�ɴﵽ��λ��ҵ��Ҫ����������״ζ�λʱ�� (Time To First Fix��TTFF) ���⡣��ִ�и������Ե�����ʱ��ʵ�ʿ�������ٵ����ǣ�ʹ�� GSV ָ��ش� C/N (Carrier-to-noise) �ȡ�
��Ȼ���ڴ���ϸ˵�� MNEA-183 Э�飬������������վѰ�����е�ָ����Ϣ���磺http://www.gpsinformation.org/dale/nmea.htm#RMC.�� LabVIEW �У���Щָ����� NI-VISA ��������ת�������

ͼ 13. ʹ�� NMEA-183 Э��� LabVIEW ����
GPS ���⼼��
Ŀǰ�ж���������ҵ��Ϊ GPS ��������Ч�ܽ����������� (Characterization)�������������ֳ�����������������е� GPS �������С����½ڽ�˵��ִ�������������ʵ�����磺���жȡ��״ζ�λʱ�� (TTFF)����λ��ȷ��/���ظ��ԣ��붨λ�ٲ����� (Uncertainty)��Ӧע����ǣ��������ͬ�ķ�ʽ�ɼ��鶨λ��ȷ�ȣ���ִ�н������ٹ��ܵIJ��ԡ���Ȼ���Ž�˵�����ֻ�����ʽ���������������С�
���ж� (Sensitivity) ������ҵ����
���ж�Ϊ GPS ���������ܵ�����Ҫ������ҵ֮һ����ʵ�ϣ��Զ���������� GPS ��������˵������Ϊ�������������ִ�е� RF ������ѡ���������˵�����ж����⼴Ϊ�����������ٲ������Ϸ����Ƕ�λ��Ϣ��������ǹ���ǿ�ȡ���һ���˾���Ϊ��GPS ���������봮������ LNA �ԴK�ߵ����棬���ܽ�Ѷ�ŷŴ��ʵĹ���ǿ�ȡ���ʵ�ϣ���Ȼ LNA ������Ѷ�Ź��ʣ�����ܽ��� SNR����ˣ��� GPS Ѷ�ŵ� RF ����ǿ�Ƚ���ʱ��SNR Ҳ�����Ž��ͣ�����ý������������ǡ�
��� GPS ��������ָ�� 2 ������ֵ��ߢȡ���ж� (Acquisition sensitivity) ��Ѷ�������ж�(Signal tracking sensitivity) [9]���������ϵ���˼��ߢȡ���ж�Ϊ���������ɽ��ж�λ�������ǿ�ȡ����෴���ԣ�Ѷ�������ж�Ϊ�����������ٸ������ǵ������ǿ�ȡ���
�Ի���������ԣ����ǿɽ����жȶ���Ϊ�����߽����������������λ������ (BER) �������ǿ�ȡ������� BER ���ز����� (Carrier-to-noise��C/N) ��ϢϢ��أ�������ж�һ���������֪�Ľ��������빦��ǿ�ȣ��ó������ C/N ֵ������
��ע�⣬�������ǵ� C/N ֵ������ֱ���� GPS ��������оƬ����á�Ŀǰ�ж��ַ�ʽ�ɼ����������ֵ����ij���������ȴ�Ǽ��㷢Ѷ���� (Message date) ���ó�Լ��ֵ�������߹��ʲ��Լ�������ģ��ʱ���¿� GPS ������һ����ɵõ� 54 ~ 56 dB-Hz �� C/N ��ֵ�����ڼ������������Ƶ���գ�GPS ����������ܵó� 30 ~ 50 dB-Hz �� C/N ֵ����˸� C/N ��ֵ������������Χ֮�ڡ�һ�� GPS ������������ﵽ��С C/N ��ֵ�����ܷ��� 28 ~ 32 dB-Hz �Ķ�λ (ߢȡ���ж�) ��Χ����ˣ�ijЩ��������������жȿɶ���Ϊ��������������Ͷ�λ C/N ��ֵ����������ǿ�ȡ���
��������˵����һ���ǻ�������Dz��Լ��������������жȡ���ʵ���������������ѿ��������ȶ���������� RF ���ʣ�����������Ե�һ����ģʽ����������ҵ����������ԣ����ж�Ϊ�������ش���С C/N ��ֵ�������ǿ�ȡ��ڽ������������У���ɷ��ֽ����������ж���Ϊ���� RF ǰ�˵�����ָ�� (Noise figure������ѧ����ʽ���������ǿɸ������е�ʽ�������ж������������ָ��֮��Ĺ����ԣ�

������ʽ 9. ���ж�Ϊ C/N ������ָ�������ɵĺ�ʽ��
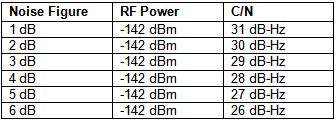
�ڵ�ʽ 9 �У����жȿɱ���Ϊ C/N ��ֵ������ָ���ĺ�ʽ��������˵����λ���������� C/N Ϊ 32 dB-Hz��������ָ��Ϊ 2 dB �Ľ����������� -140 dBm (-174 + 32 + 2) �����жȡ�Ȼ�������������Ի�Ƶ (Baseband) �շ���ʱ�����������˵�һ�� LNA��һ�������Ϊ��ͼ��ʾ��
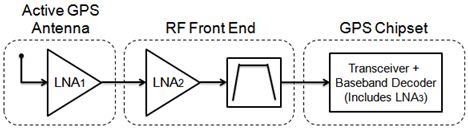
ͼ 14. GPS ������������������ LNA [6]
��ͼ 14 ��ʾ��һ�� GPS ���������Ǵ����˶��� LNA��Ϊ GPS Ѷ���ṩ��Ч�ʵ����档����ǰ��˵����һ�� LNA ����������ϵͳ������ָ����ͼ 14 �У������ȼ��� LNA1���� 30 dB �������� 1.5 dB �� NF�����⣬���Ǽ������� RF ǰ�˾��� 40 dB �������� 5 dB �� NF��������ע�⣬���� LNA2֮����������ʽ����� -174 dBm/Hz �������� (Thermal noise)����˴�ͨ (Bandpass) �˲�����ͬʱ����Ѷ������������˽���������� SNR ����κ�Ӱ�졣������Ǽ��� GPS оƬ��ɲ��� 40 dB �������� 5 dB ������ָ�������ɼ��������ϵͳ������ָ��Ϊ��

ͼ 15. ���������ģʽ�������� NF
�������м��㣬�����ҳ��������������������ӣ�


������ʽ 10 �� 11. ��һ�� LNA ������ϵ����Ӱ�������������ϵ��
����ʽ 10 �� 11 �������� GPS ���������������������ߣ���������ָ��Լ�ɴ� 1.5 dB����ע�⣬�����Ѿ��Ⱥ������������ָ����ʽ�еĵ��������������ڴ���ֵ��С�������Ͽɽ�֮���ԡ�
��ijЩ�����У�GPS ����������ҵ�������ʹ���ڽ� LNA����˲��Ե㽫���Խ������ĵ�һ�� LNA�����һ�������ڶ��� LNA �ó�����ָ�������������ִ��ڵ�һ�� LNA ������ָ�������� LNA1�Ƴ�����������е�ʽ�ó� LNA2������ָ����


������ʽ 12 �� 13. �Ƴ���һ�� LNA ���õ��Ľ���������ָ��
���ʽ 12 �� 13 ��ʾ�������߱��������ָ���� LNA �Ƴ������Ӱ�����������������ָ������ע�⣬��Ȼ�ˡ�������GPS ����������ָ���ļ��㷶����Ϊ�������������Ծ�������Ҫ�ԡ����ڽ����������ֵ� C/N ��ֵ��ʵ����ϵͳ������ϵ���ܲ��ɷ֣����ϵͳ������ϵ����Э�������趨���ʵ� C/N �������ơ�
��һ�������ж�����
���˽����ж�����Ļ�������֮���Ž�����ʵ������ĸ�������һ�����ϵͳ������ֱ����������ģ��� L1 ��һ�����ز������� DUT �� RF ͨѶ�˿��С�Ϊ�˻�� C/N ��ֵ�����ǽ��������趨�� NMEA-183 Э�����ͨѶ���� LabVIEW �У�����贮�� 3 �� GSV ָ����ɶ�ȡ�������� C/N ֵ��
���� GPS ���˵������һ L1 ������λ�ڵ�����棬���书��Ӧ������ -130 dBm [7]��Ȼ���������߶������뻧��� GPS ������ʹ�������ѽ�һ��ѹ���˲������ơ���ʵ�ϣ���� GPS �������ɴ���� -142 dBm ��λ�����жȣ������ -160 dBm Ѷ���١���һ����ҵ�� (Operating point) ʱ��������� GPS ����������Ѹ�ٳ����������� 6dB ��Ѷ�ţ�������ǵIJ��Լ�����ʹ�� -136dBm ��ƽ�� RF ����ǿ�ȡ�
��Ҫ�ﵽ��ѵĹ��ʾ�ȷ��������ˮƽ (Noise floor) Ч�ܣ�������� RF ����Ѷ�Ų������������ʹ�����˥�����ڴ�����İ����У�40 dB ~ 60 dB �����˥�����������Ǹ��ӽ����Է�Χ (���� ≥ -80 dBm)�����Ʋ��������������ڸ���������Ķ�λ˥�� (Fix attenuation) �������̶�����˱�������Уϵͳ���Ծ������Լ�������ȷ���ʡ�
��У�����У����ǿɿ��ǣ�1) Ѷ�ŵķ�ֵƽ���� (Peak-to-average ratio)��˥�����������ֵIJ��죬�����κν�����ҵ���ܵIJ������ (Insertion loss)��Ϊ��Уϵͳ��Ӧ�ȴ� DUT �ж��������ٽ����������� RF ����Ѷ�ŷ����� (�� PXI-5661)��
Part A����һ����У
��ִ�����ж�����ʱ��RF ����ǿ�ȵľ�ȷ�ԣ�ʵΪѶ�Ų���������Ҫ������֮һ�����ڽ������ɻ�� 0 ���־�ȷ�ȵ� C/N ֵ (�� 34 dB-Hz)��������������е����ж�����ɴ� ± 0.5 dB �Ĺ��ʾ�ȷ�ȡ���ˣ�����ȷ�����ǵ��ǿع�������Ҫ�ﵽ��Ȼ����ϵ�Ч�ܡ�����һ�� RF �ǿ���ҵ��רΪ��Χ����ǿ�ȡ�Ƶ�ʷ�Χ�����¶���������ƣ������ִ�л���ϵͳУʱ������Ŀ��ظ��� (Repeatability) ӦԶ�����ض�����Ч�ܡ������½ڽ���һ��˵����ȷ�� RF ���ʾ�ȷ�ȵ� 2 �ַ�����
���� 1����һ����ʽ RF ˥������
��Ȼʹ�����˥������Ϊ��ȷ�� GPS Ѷ�Ų�����ҵ�ɴ���������ܶȣ���ʵ�ʽ��� 20 dB ��˥��������ȷ�������ܶȵ��� -174 dBm/Hz����ʹ�� 20 dB �Ĺ̶��� (Pad) ʱ�����轫�����趨Ϊ���� 20 dB �� RF ����ǿ�ȼ��ɡ�Ϊ�˴ﵽ -136 dBm ��Ŀ�꣬����Ӧ�������Ϊ -115 dBm (���� 1 dB �������߲������)���ҽ� 20 dB ˥����ֱ������������������������ﵽ�� RF ���ʽ�Ϊ -136 dBm�����Ծ��ж���IJ�ȷ���ԡ����� 20 dB �Ĺ̶������ ± 0.25 dB �IJ�ȷ���ԣ��� RF ���������� -116 dBm ���� ± 1.0 dB �IJ�ȷ���ԣ�������IJ�ȷ���Խ�Ϊ ± 1.25 dB����ˣ���Ȼ���� 1 ��Ϊ���Ҳ������У��������ϵͳ�еĶ��������δ����У����˿��ܽ��ŷ�����ȷ���ԡ���ע�⣬���������ȷ��������Ҫ��ԭ��֮һ����Ϊ��ѹפ���� (Voltage standing wave ratio��VSWR)����Ϊ����ʽ˥������ֱ��������������������Է����������פ����Ϊʵ��˥�������ڽ����˹��ʵIJ�ȷ���ԣ���˿��������幦�ʵľ�ȷ�ԡ�
��ע�⣬�˴���ʹ�ø�Ч�� VNA ȷʵ���ⱻ��˥��������������װ�ã������� ± 0.1 dB �IJ�ȷ����֮�ڣ�������Ҫ���õ�˥����
���� 2������У�Ķ��鱻��˥����
У RF ���ʵĵڶ��ַ���������ʹ�ø߾�ȷ�ȵ� RF ���ʼ� (���� ± 0.2 dB �ľ�ȷ�ȣ�����Ϳɴ� -70 dBm) ������̶�ʽ˥��������Ϊ�������Թ̶�Ƶ�ʣ�����Խ�С�Ĺ��ʷ�Χ���� RF �����������Կ���Ч�����ɲ�������ɵ��κδ����⣬���ڱ���˥�������Թ̶�Ƶ�ʽ������Զ�����������У�䲻ȷ���ԡ��ڷ��� 2 �У���Ҫ������ȷ������ϵͳ�ɴﵽ���Ч�ܣ��ҽ���ȷ���Խ�����͡��˸߾�ȷ�ȹ��ʼƿɴ����� 80 dB �Ķ�̬��Χ (����Ϊ˫ͷʽ����)������ȷ����͵����ⲻȷ���ԡ�
���߾�ȷ�ȵĹ��ʼƣ�����ʹ�� 3 ��������ҵ����ϵͳУ��1 ����������Ѷ�Ų������� RF ���ʣ����� 2 ��������ҵ��У˥������Ϊ�˴ﵽ��ѵIJ�ȷ���ԣ���Ӧ�趨ϵͳ��������������������Ҫ�ﵽ -136 dBm �� RF ����ǿ�ȣ���ɽ� RF �����������Ϊ -65 dBm �Ĺ���ǿ�ȣ���ʹ�� 70 dB �̶�˥�� (���� 1 dB �������)��Ϊ��ȷʵ���� RF ����ǿ�ȵij��������ҵ��������̶��� Padding Уʵ��˥����У�������£�
1) �� VSG �������Ϊ+15 dBm ����ǿ��
�ɿ��� Measurement and Automation Explorer (MAX) ��ʹ�ò�����塣����������� +15 dBm ���� 1.58 GHz ������ (CW) Ѷ�š�
2) �Ը߾�ȷ�ȵĹ��ʼ����� RF ����
ʹ�� RF ���ʼƣ��ù��ʴﵽ�������ʾ�ȷ�ȹ��� +14.78 dBm (�����ֵ) ֮�ڡ�
3) ���� 70 dB �̶�ʽ˥����(30 dB + 20 dB + 20 dB) ���κα�Ҫ��������
4) �Ը߾�ȷ�ȵĹ��ʼ����� RF ����
�����ʼ��趨Ϊ���ƽ��ֵ (512)�������� RF ����ǿ�ȡ��˴��Ķ���Ϊ -56.63 dBm��
5) ���� RF �ܺ���
���� +14.78 dBm ��ȥ -56.63 dBm��������������˥������������֮��ȷ������ 71.41 dB �Ĺ��ʺ�����ע�⣬���˥���������߱���� ± 1.0 dB �IJ�ȷ���ԡ�����������õ�˥��������ߴ� ± 3.0 dB �ı仯������У˥����������Ҫ��ȷ����֪˥���ɴ�ϵ͵IJ�ȷ���ԡ�
����˥�����������ߵ�У���̣�����ȷ������� RF ����ǿ�ȱ���ﵽ -136 dBM������ǰ���� 71.41 dB ˥�������뽫 RF ����Ѷ�Ų������趨Ϊ -58.59 dBm �Ĺ���ǿ�ȡ���Ҫȷ�ϳ�����ƹ���Ĺ���������������в�����У�
6) ֱ�ӽ����ʼƸ����� RF ����Ѷ�Ų�����
���Ƴ����е�˥�����������ߡ�
7) �� RF �������趨��Ҫ��ֵ��ʹ������ʴﵽ-136 dBm��
��������Ƶ���ֵӦΪ -58.59 dBm������ -136 dBm + 71.41 dB ���á�
8) �Թ��ʼ���������ʡ�
��ע�⣬����õ� RF ���ʣ����������Ĺ��ʾ�ȷ�ȶ�������ͬ����ʹ��� -58.59����ʵ�ʽ���ཫ�������IJ�ȷ���Զ�����Щ���仯��
9) ��������������ֱ�����ʼƶ���-58.59 dBm
��Ȼ RF ����������һ�����ݴ���Χ�ڽ�����ҵ��������ֵ�������п��ظ��ԣ���ɵ��� RF ���ʼƽ���У��ֱ���ó����ʵ���ֵΪֹ��
���������������� 3 �� RF ����������ҵ�����ɾ�������� RF ���ʡ���ˣ���������װ�þ��� ± 0.2 dB �IJ�ȷ���ԣ���ɵó� – 136 dBm �Ĺ��ʲ�ȷ���Խ�Ϊ ± 0.6 dBm (3 x 0.2)��
Part B���������
����У RF ����ϵͳ�Ĺ���֮���Ž������ RF �������ij�����ƣ�������ǿ���趨�����ý������ش���С�� C/N����Ȼ�����������жȵ� RF ���ʽ����������������ͬ�����ǽ����� C/N �� RF ���ʵı�ֵ�����������������Թ�ϵ�������ǵIJ����У��ɼ�������� C/N Ϊ 28 dB-Hz �Խ��ж�λ������ʽ 12�����ɵó������� C/N ��ֵ������ָ��֮��Ĺ�ϵ��

������ʽ 14. C/N ��Ϊ����ָ�������ǹ��ʵĺ�ʽ
�������ǹ����ȶ�����ɷ����ɽ������ر��� C/N �ȣ������͵��ڽ�����������ָ����ʽ���±���ʾ�ɴﵽ�Ķ��� C/N ��ֵ��
ͼ 16. C/N Ϊ����ָ���ĺ�ʽ
һ����˵���������ϵ� GPS ����оƬ�飬���ó���λ��ҵ�������С C/N ��ֵ��Ȼ�����ֱ��������������������ָ�������ܾ���Ŀǰ����ǿ�����ܴﵽ�� C/N ��ֵ����ˣ����������ж�ʱ���������˽ⶨλ��ҵ�������С C/N ��ֵ��
��ʵ�ж��ַ������������жȡ����ϱ���ʾ��RF ���������жȾ���ֱ������ԡ���ˣ��ɸ������е����жȹ���ǿ�ȣ������������ C/N ��ֵ����ɸ��ݲ�ͬ�� RF ����ǿ�ȣ��ó�ϵͳ���жȡ�
Ϊ��˵����㣬���ע�� RF Ѷ�Ź����� GPS ������ C/N ��ֵ���ڲ�ͬ����ǿ��֮�µĹ�ϵ���·�������ҵ�����õļ������������˵�һ�� LNA �����У��ҽ���������������ָ��ԼΪ 8 dB����ͼ 17 ��ʾ��ؽ����
ͼ 17. �������� C/N ��ֵΪ RF ���ʵĺ�ʽ
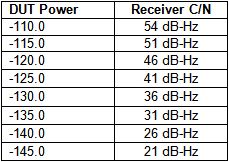
��ͼ 17 ��ʾ�������ⷶ���� RF ������ C/N ��ֵ�������dz������������Թ�ϵ������ʹ�ø����빦��ģ�� C/N ��ֵ��������������������������������ֿ��ܵ���� C/N ֵ��Ȼ������Ϊ���κ������£�����ʵ���оƬ�������������� 54 dB-Hz �� C/N ֵ��������Щ�������Ԥ�ڷ�Χ֮�С�
����ͼ 7 ����ʾ RF ���������ж�֮������Թ�ϵ����ʵ������Խ�����ģ�ⲻͬ�Ĺ���ǿ�ȣ����ɽ��� GPS ������������������ҵ������������ -142 dBm �ó� 28 dB-Hz �� C/N ֵ��������� -136 dBm �õ� 34 dB-Hz �� C/N ֵ�����ر�ע�������ٶȣ����ʹ�ýϸߵ� C/N ֵ���ٴӽ�����ƶϳ����жȵ���Ϣ��
�ҳ�����ָ��
�ָ��ݵ�ʽ 13 �� 14�������������� (Carrier-to-noise ratio)����ɵó���������оƬ�������ָ���������·���ʽ 15 ��ʾ��
������ʽ 15. ����������ָ��Ϊ������ C/N ��ֵ�����ɵĺ�ʽ��
����ͼ 17 ��ʾ��������������ָ����ֱ���� RF ����ǿ��������Ȼ��ɱ��������ݴ˹�ϵ�����ǽ������ RF ����ǿ���� C/N ���й����ԣ���������оƬ�������ָ������������������ע�⣬Ӧ�� 0.1 dB Ϊ��λ���Ӳ������Ĺ��ʡ����� NMEA-183 Э�����õ������� C/N ֵ��������ӽ���С����Ϊ���������������� C/N ��ֵʱ��Ӧ��������ָ���� 1 λ���ľ�ȷ�ȡ����������ͼ 18 ��ʾ��
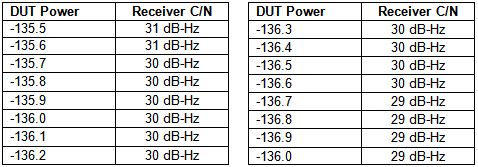
ͼ 18. DUT ����������� C/N �Ĺ�����
��ͼ 18 ��ʾ���� RF ����ǿ�ȴ��� -136.6 dBm ~ -135.7 dBm ֮�䣬���� C/N ��ֵ��ά���� 30 dB-Hz���������뷨���� NMEA-183 ������ʱ������ȷ�� -136.1 dBm ����ǿ�Ƚ����� 30.0 dB-Hz �� C/N ��ֵ��������ʽ 14��оƬ�������ָ����Ϊ -174.0 dBm + -136.1 dBm + 30.0 dB-Hz = 7.9 dB����ע�⣬�˼����Ǹ��� 2 �鲻ȷ����ϵ�������У�����Ѷ�Ų������Ĺ��ʲ�ȷ���ԣ����н������������� C/N ��ȷ���ԡ�
�������ǵ� GPS ����������
���ж�������Ҫ��һ���Ǽ��������ж��������������Ҫ�ɷ���������ǵĵ�һ���Լ���������һ����˵�����״ζ�λʱ�� (TTFF)����λ��ȷ�ȣ��뾫ȷ�Ƚ��� (Dilution of precision) ��������ҵ������Ҫ���������ж�λ�����ڽ�������Ҫ���� 4 �����ǽ��� 3D ��λ��ҵ�������Щ���⽫�����ж��������ú�ʱ��Ҳ��ˣ����λ������ҵ���ڼ�����У��ҵ�н��У�������������ʱ��ִ�С�
���½ڽ�˵����Ϊ�������ṩ��������Ѷ�ŵķ����������� GPS ������ҵʱ���ཫ��ʹ�����˽� TTFF �붨λ��ȷ�������ִ�з������������� RF ��¼�벥����ҵ����һ��˵��Ӧ����ڶ���������£�У��������Ч�ܡ�
�����״ζ�λʱ�� (TTFF) �붨λ��ȷ��
�״ζ�λʱ�� (TTFF) �붨λ��ȷ�����⣬Ϊ��� GPS ����������Ҫ������ҵ�������ѽ����������Ե� GPS Ӧ����Ȼ���أ���Ӧ֪���������ش���ʵ��λ�������ʱ�䣬�����Ӱ�����������;�����⣬�������ر���λ�õľ�ȷ������Ϊ��Ҫ��
Ϊ���ý������ɽ��ж�λ����Ӧ������ѶϢ (Navigation message) ����������������Ϣ�����ڽ������������� GPS ��ܱ���ķ� 30 �룬��ˡ������� (Cold start)���� TTFF ״̬����Ҫ 30 ~ 60 �롣��ʵ�ϣ�����������ָ������ TTFF ״̬�������Ϊ��
������ (Cold Start)����������������������������Ϣ�����ܽ��ж�λ�����ڱ���Ӹ��������������� 1 �� GPS ��� (Frame)����˴�����Ľ�������������״̬�£����� 30 ~ 60 ��ʱ���ж�λ��
������ (Warm Start)����������������Ϣ��δ���� 1 �����ڣ��Ҳ���Ҫ����������Ϣ��һ����˵���˽��������� 20 ���ڵ�֪Ŀǰʱ�䣬���ɽ��� 100 �����ڵĶ�λ [2]�������������״̬�� GPS ������������ 60 ���ڽ��ж�λ����ʱ����������̵�ʱ�䡣
�ȿ��� (Hot Start)���������߱����µ�������������Ϣʱ����Ϊ�ȿ���״̬������������ȡ�ø������ǵ�ʱ����Ϣ�����ɿ�ʼ�ش���λλ�á�������ȿ���״̬�� GPS ������������ 0.5 ~ 20 �뼴�ɿ�ʼ��λ��ҵ��
�ڴֵ�����£�TTFF �붨λ��ȷ�Ⱦ����ض�����ǿ����ء�ֵ��ע����ǣ������ڶ�������¼���� 2 �ֹ��ľ�ȷ�ȣ���ʵ����������Ϣ��ֵ����Ϊ GPS ����ÿ 12 ��Сʱ�����е��� 1 Ȧ�����Կ��÷�Χ�ڵ�����Ѷ����ʱ���ڱ仯��Ҳ�ý��������ڲ�ͬ��״̬�»ش���ȷ�����
�����½ڽ�˵��Ӧ���ʹ�� 2 ������Դ����ִ�� TTFF �붨λ��ȷ�ȵ����⣬������
1)���������䲼���У�����������õ�ʵʱ����
2)�����д�������¼�� RF Ѷ�ţ�����֮���Բ��Խ���������¼������
3)����¼ʵʱ���ݺ�RF ����������ģ������ʱ�� (Time-of-week��TOW) ���õķ��������ô� 3 �ʲ�ͬ������Դ���Խ����������ø�������Դ��������ҵ���߱����ظ����ԣ��Ҿ���߱�����ԡ�
�����趨
��Ҫ�����ѽ��������ѡ��ļ�¼λ�ã�Ӧ�����Dz����ܵ����⽨������谭������ѡ�� 6 ��¥ͣ�����Ķ�¥���в��ԣ������︲�ǵ��ݶ������ܽӴ���������Ѷ�š��� GPS оƬ��Ķ������ģʽ������ִ�� TTFF ������ҵ���� SIRFstarIII оƬ��Ϊ������������������ij������������������������ȿ���ģʽ���·���ʾ��Ϊ������ִ����ز��ԵĽ����
��Ҫ����ˮƽ��λ�ľ�ȷ�ȣ��������ݾ���γ����Ϣ�����˽���ش���������Щָ�����ԡ��ȡ���ʾ����˿������е�ʽת��֮��

������ʽ 16. ���� GPS �Ķ�λ����
��ע��õ�ʽ�е� 111,325 ���� (111.325 ����)�������ڵ���Բ�ܵ� 1 �� (�� 360 ��)����ָ���Ǹ��ݵ���Բ�� 360 x 111.325 km = 40.077 km ������
Off-The-Air GPS
�ԡ�Off-the-air����ʽ����������� TTFF ʱ�����ǽ�������ֱ���������ߴﵽ���ȷ�ķ�ʽ�����ڴ�������ҵ������Ѽ�¼������ GPS Ѷ�ţ�����У�Զ���������ҵ����������һ������Ҫ�ԡ�����֮�⣬������ SIRFstar III оƬ����г�����ƣ��ý���������������ģʽ�����Խ��������õ��� TTFF ֵ��������������ҵ����ע�⣬GPS ������һ��ָ��Ϊ 32.6 ��������� TTFF ʱ�䡣�����ǵ�������ҵ�У���õ����н����
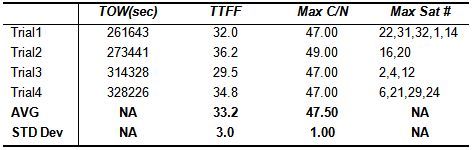
ͼ 19.��Off-the-air��GPS Ѷ�ŵ� TTFF ����� C/N ��ֵ
���ݳ�ʼ�� ��Off-the-air���������ɷ��� GPS �������ڱ��� 3 ������ڣ��ɴﵽ 33.2 ��� TTFF����Щ��������λ�� TTFF �����ݴ���Χ�ڡ�������Ҫ�ģ����ǿ����������¼�� GPS ���ݣ������Ƚ���������ʵ�ʽ����
����������������ʽ�����ɼ��������������Ա���
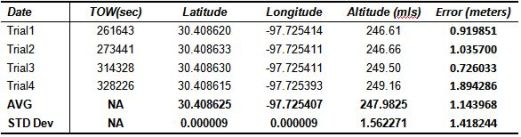
ͼ 20. �ɡ�Off-the-air��GPS Ѷ�����õ� LLA
��ע�⣬��Ҫ����Off-the-air��GPS Ѷ�š�����Ѷ�ţ��벥��Ѷ�Ž�����أ�������Ƚ��С�Off-the-air��Ѷ�Ź��ʵ�����ԡ������� TTFF �붨λ��ȷ������ʱ��RF ����ǿ�Ȼ����ϲ�̫��Ӱ�쵽�������ˣ�����ȶԡ�Off-the-air�������棬���¼ GPS Ѷ�ŵ� C/N ��ֵ�����ɽ��� RF ���ʵ��������ҵ��
�Ѽ�¼�� GPS Ѷ��
��Ȼ����ʵʱѶ������ TTFF �붨λ��������Щ������ҵ���������ظ�����ͬ���Ǿ��������Ƶ������У����ǹ̶����������п��ظ� TTFF �붨λ��ȷ�ȵ����ⷽʽ֮һ������ʹ���Ѽ�¼�� GPS Ѷ�š����½ڽ�����˵��Ӧ������Ѽ�¼�� GPS Ѷ�ţ��Խ���ʵʱ GPS Ѷ�ŵ������ҵ��
�Ѽ�¼�� GPS Ѷ�ţ����� RF ����Ѷ�Ų������ٴβ��������ڱ��벥��Ѷ�ţ���У RF ����ǿ����ķ��������DZȶ�ʵʱ���¼�� C/N ֵ������á�Off-the-air��Ѷ��ʱ����ɷ�������ʵʱѶ�ŵ� C/N ��ֵ��ԼΪ 47 ~ 49 dB-Hz ֮�䡣
������Ѷ�ŵĹ���ǿ�ȣ���ɴﵽ��ʵʱѶ����ͬ�� C/N ֵ������ȷ�������õ� TTFF ��λ�þ�ȷ�ȣ�������ʵʱѶ�Ų�����ء�����ͼ 21 �У�����ʹ�õ�����ʱ�� (TOW) ֵ��ʵʱ��Off-the-air��Ѷ�ŵ� TOW ��������� 4 �β�ͬ��ʵ���µõ� TTFF �����

ͼ 21. �ɡ�Off-the-air��GPS Ѷ�����õ� TTFF
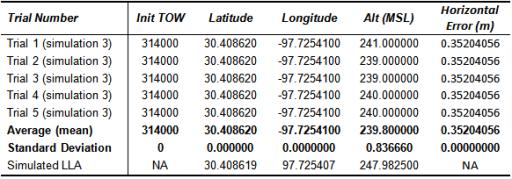
���������״ζ�λʱ��֮�⣬������� GPS ��������ȡ�õľ��ȡ�γ�ȣ���߶���Ϣ����ͼ��ʾ��ؽ����
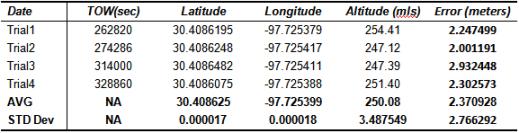
ͼ 22. �ɡ�Off-the-air��GPS Ѷ�����õ� LLA
��ͼ 21 �� 22 �п�ע�����ʵ���Ѽ�¼�� GPS Ѷ�ţ����ɵõ������Ŀ��ظ� TTFF �� LLA (Latitude��Longitude��Altitude) �����Ȼ����������Щ������ҵ�Ĵ���������������ڡ�Off-the-air�����������˼����ɽ�֮���ԡ���Ϊ���Ծ�ȷ�� (Absolute accuracy) �ϸߣ����Կ��ظ���������ڡ�Off-the-air��������ҵ��
����� GPS Ѷ��
��� 1 �ֿɽ��� TTFF �붨λ��ȷ������� GPS ����Ѷ����Դ����Ϊ����Ķ������� GPS Ѷ�š��� NI LabVIEW GPS �����飬��������ʹ���߶���� TOW�����������������λ�ã�������� 12 �����ǡ��� GPS Ѷ�ŷ��淽ʽ����Ҫ�ŵ㣬���������ܵ����Ѷ��� (SNR) ���� GPS Ѷ�š���ʵʱ/��¼�� GPS Ѷ�Ų�ͬ�������ַ����������Ŀ��ظ�Ѷ�ţ�������������С��ͼ 23 �������˷����������Ѷ�ŵ�Ƶ��
VSA �趨
Center: 1.57542 GHZz
Span: 4 MHz
RBW: 100 Hz
Averaging: RMS, 20 Average

ͼ 23. ����������� GPS Ѷ�ŵĴ��ڹ��� (Power-in-band) ������ҵ
��������Ķ������Dz��β��Խ�����ʱ�������Խ��������ṩ�� C/N ��ֵ���й��������ٴ���������� RF ���ʡ�
һ����Ϊ RF ����ǿ�Ƚ��й�������ɽ������� TTFF�������� TTFF ʱ��Ӧ������ RF ����Ѷ�Ų����������� 5 ����֮���ֶ���������תΪ���䡹����ģʽ��һ��������ȡ�ö�λ��Ϣ���ر� TTFF ��Ϣ����ͼ����ַ��� GPS Ѷ�ŵ���ؽ����

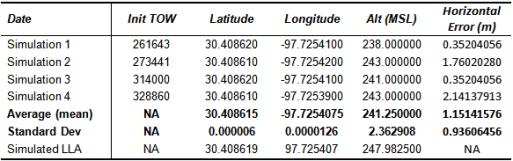
ͼ 24. TTFF ��ֵ�� 4 ��ר��ģ��
��ע��ͼ 24 �е����з�����ҵ��ʹ����ͬ�� LLA (Latitudes��Longitude���� Altitude)��
���⣬��Ҫ���� TTFF�������������ͬ�� TOW ����������ҵ���Լ��� LLA �ľ�ȷ������ظ��ԡ���ע�⣬����������Сʱ֮�ڣ����õ�����Ѷ�Ž������仯����˱����趨���� TOW �Բ��Ծ�ȷ�� (��ͼ 24)����ͼ 25 ���ʾ�� LLA ��Ϣ��
ͼ 25. ���� TOW ������ҵ��ˮƽ��ȷ��
��ͼ 25 �У��ɸ���ģ��Ķ�λ�����������Ϊ��λ��ˮƽ��������ͼ 20 ��ʾ���������е�ʽ�ҳ�����

������ʽ 17. ���� GPS Ѷ�ŵĶ�λ����
�����������ʹ�õĽ��������ԣ���ˮƽ��λ������Ϊ 5.2 ���ߣ�ˮƽ��λƽ�����Ϊ 1.5 ���ߡ�����ͼ 18 ��ʾ��������ʹ�õĽ��������ɴ�ָ��������֮�ڡ�
����ǰ�������������ľ�ȷ�ȣ�����õ�����Ѷ���ܲ��ɷ֡�Ҳ����˵���������ľ�ȷ�ȿ���������Сʱ�ڴ���仯 (����Ѷ�Ÿı�)����������ظ���ȴ��С��Ϊ��ȷ�����ǵ� GPS ��������Ϊ��ˣ��������ض���ģ�� GPS ����ִ�ж�����ԡ�������ҵ��Ҫ�DZ���ȷ�ϣ�RF �ǿز�����Է���� GPS Ѷ�Ų�������IJ�ȷ���ԡ����·�ͼ 26 ��ʾ�����ظ�ʹ����ͬ�Ķ����Ƶ���ʱ��������ʹ�õ� GPS ���������õ����߿��ظ��Ե����⡣
ͼ 26. ��ͬ���εĸ��β��ԣ����������м��ߵĿ��ظ���
��ͷ�ٿ�ͼ 20��ʹ�÷��� GPS Ѷ�ŵ�����ŵ�֮һ�����ǿɴﵽ���ظ��Ķ�λ��������ڴ����Կ�������ȷ�ϣ����ر��Ķ�λ��Ϣ����������Ϊ��Ƶ��� (Iteration) �������仯������ڿ�������Ƽ�����У������Ը�����Ҫ��
���̬��λ��ȷ��
GPS ���������Ե���� 1 �ַ���������������������ٹ��ܣ�ʹ���ڴ�Χ�Ĺ���ǿ�����ٶ���ά�ֶ�λ���ڹ�ȥ�����ֲ��� (������Ϊ���ܲ���) �ij�������֮һ���������������������·��˥�� (Multi-path fading) ģ�⡣���������� (Drive test) �У�����ʹ�ÿɵ������Ѷ�ż��� (Impairment) ����֪·��������ԭ�ͽ��������������������ǽ���Ȼ���������� GPS ����Ѷ�ŵļ����������Щ������������ظ�����ʵ�ϣ���GPS �����ƶ������������ı仯���������ʱ�� (Time of year) �����أ�����Ӱ���������Ч�ܡ�
��ˣ�Ŀǰ�� 1 �����ռ��ķ��������������������ϼ�¼ GPS Ѷ�ţ��Դ���Ѷ�ż�����������Ч�ܡ���Ҫ��һ���˽��趨 GPS ��¼ϵͳ�ķ����������ǰ���½ڡ������������Է����У��ж�� PXI ����ɹ�ѡ����ķ�ʽ������ʹ�� DC ���䲢��������ؽ��й��硣��ο�ʹ�ñ��� AC ���䣬����ת��������ʹ��������ع��硣�ڴ� 2 ��ѡ���У�DC ����ĺĵ����ϵͣ������������ʵ�����й��硣��������ʾ�ı� AC ����ʹ�ý�������������ϵͳ����� 1 ����ӵij��õ�أ��� 1 �� DC to AC ת������
һ��������� GPS Ѷ�ŵļ�¼��ҵ����������ͬ�IJ��������ظ����Խ����������·���˵���У������ٽ������ľ��ȡ�γ�ȣ����ٶȡ������ж˿���ÿ�� 1 �ε� NMEA-183 ָ���ȡ���ʣ��ӽ�������ȡ��������ݡ����·������У����������ֵĽ��������Բ��������ж�λ������ C/N ֵ����ע�⣬��ִ����Щ������ҵ��ͬʱ����ɷ���������Ϣ����Ȼ���н���в�δ����ˮƽ��ȷ��˥�� (Horizontal dilution of precision��HDOP)���������Բ�������ṩ�����Ľ�������λ��ȷ����Ϣ��
��Ҫ�����ѽ������Ӧȷʵͬ������������ RF ������ҵ��ָ��ӿڡ��·���ʾ����У����ǽ� COM �� (pin 2) �������ŵ���Ϊ��ʼ�������������RF ����Ѷ�Ų������� GPS ģ�����ͬ��������ͬ������ʽ�������Ⲩ�β������� 1 ��Ƶ��ѭ�� (100 MS/s)�����ɽ�������Ѷ�Ų������� GPS ��������ͬ����������������� (Skew) ӦΪ 10 μS������ע�⣬��Ϊ���ǽ�ȡ�ý������ľ�γ�ȣ�������ͬ������ҵ����ɵľ�ȷ�ȴ���Ϊ 10μs ���� Max Velocity (m/s)����Ϊ 0.15 mm��
ʹ���������趨�����Ǽ��ɰ�ʱȡ�ý������ľ�γ�ȡ����������ͼ��ʾ��

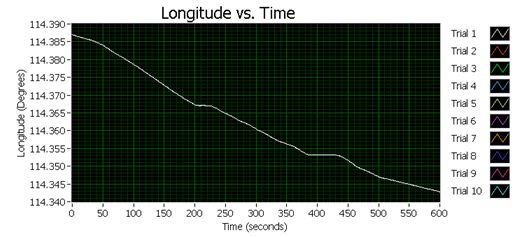
ͼ 27 �� 28. ÿ 4 �������õ��Ľ�������γ��
��ͼ 27 �� 28 �����ֵ������У���ʹ���Ѽ�¼����������Ѷ�ţ�ȡ��ͳ�ơ���λ�����ٶȵ������Ϣ���������ǿɹ۲쵽����ÿ�εIJ���֮�䣬������Ϣ������ԵĿ��ظ��ԣ���Ϊÿ�������켣�����ֵIJ��졣��ʵ�ϣ��������������Ҫ�Ľ��������ظ��� (Repeatability)�����ڿ��ظ�����Ϣ����Ԥ�� GPS ��������ȷ�ȵı仯���Σ����������ɼ��㲨�θ�������֮��ı�����ͼ 29 �У������ڸ���ͬ����ȡ����ҵ֮�䣬������Ķ�λ��� (�����ƽ��λ��)��
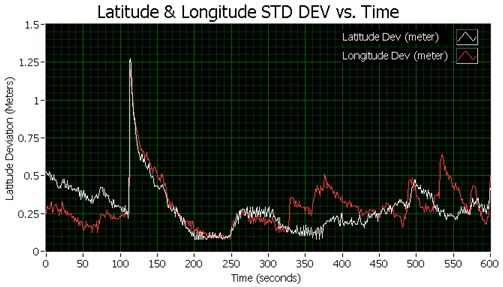
ͼ 29. ��ʱ��ȡ�õľ�����γ�ȱ����
������ˮƽ�����ʱ����ע�������� 120 ��ʱ�������ӡ�Ϊ�˽�һ���˽��������������ݽ��������ٶ� (m/s) �� C/N ֵ�� Proxy�������ˮƽ����������Ԥ�ȼ��裺��û�и߹������ǵ������£����ǵ� C/N ��ֵ����Ӱ�����������ˣ�������Խ��������ش� 4 ����߸߶ȵ����ǣ�ƽ���� C/N ��ֵ������� 1 �� C/N �� Proxy�������������ͼ 30 ��ʾ��

ͼ 30. ��λ��ȷ���� C/N ֵ�������
��ͼ 30 ��ʾ���� 120 ��ʱ�������ķ�ֵˮƽ���� (�������)���������ǵ� C/N ֵ����ֱ�ӹ�����������������ٶ��ء��˴�ȡ���ı����ԼΪ 2 ���ߣ����ѵ�������ȡ��Լ 10 ���ߵ���ͬʱ�����ǿɷ���ǰ 4 ���� C/N ƽ��ֵ���ɽ��� 45 dB-Hz �轵�� 41 dB-Hz��
�����IJ��Բ���˵�� C/N ��ֵ�Զ�λ��ȷ�ȵ�Ӱ�죬��˵�����Ѽ�¼ GPS �������ܽ��еķ�����ҵ���ࡣ�ڴ˲����е� GPS Ѷ��������¼��ҵ�������й����� (Shenzhen) �����Ļ����� (Huizhou) �����С��������ڵ��ݰ�˹͡ (Austin Texas) ����ʵ�ʵĽ�������
����
����ƪ�ļ��������ģ�Ŀǰ���ж�����ɲ��� GPS ����������Ȼ�����жȵĻ������⣬��������������У����Ǵ����⼼��������ڼ����������Ч�ܡ���Щ���Լ�����Ȼ���б仯�����Ǿ����ڵ�һ PXI ϵͳ��ȫ����ɡ���ʵ�ϣ�GPS ������������������¼�Ļ�Ƶ (Baseband) ���ν��в��ԡ������ϵķ�ʽ������ʦ��ִ�������� GPS ���������ܲ��ԣ������жȵ�������ظ��ԡ�
�����
[1] Pratt, Bostonian, and Allnutt. Satellite Communications
[2] Navstar GPS User Equipment Introduction, September 1996
[3] Gu, Quzheng, RF System Design of Transceivers for Wireless Communications, Springer, 2005. Fundamentals
[4] Ward, Phillp W., Betz, John W., and Hegarty, Christopher J. Chapter 5: Satellite Signal Acquisition, Tracking and Data Demodulation, excerpt from: Understanding GPS: Principles and Applications by Elliot D. Kaplan, Artech House, 2005.
[5] Global Positioning System: Theory and Applications, Edited by Bradford W. Parkingson and James J. Spilker
[6] Braasch, Michael S. and Van Dierendonck, A. J. GPS Receiver Architectures and Measurements, Proceedings of the IEEE, 1999.
[7] Global Positioning System Standard Positioning Service Signal Specification, 1995.
[8] Global Positioning System Standard Positioning Service Signal Specification. Annex A, Standard Positing Service Performance Specification, 1995.
[9] Goldberg, Hans-Joachim. Atmel Whitepaper: Measuring GPS Sensitivity, 2007.