ПМБўОДЈ¬ХЕРЎЗнЈ¬ОвПюкЙЈ¬Бх Рс
ЈЁ1.ЦР№ъөзЧУҝЖјјјҜНЕ№«ЛҫөЪИэК®СРҫҝЛщЈ¬ЛДҙЁ іЙ¶ј 610041Ј»2.ОдҫҜЦШЗмЧЬ¶УІОДұІҝЈ¬ЦШЗм 401147Ј©
0 ТэСФ
ДҝЗ°Ј¬»щУЪО»ЦГөД·юОсЈЁLocation Based ServiceЈ¬LBSЈ©ТСҫӯСёЛЩ·ўХ№Іў№г·әУҰУГУЪКТНв»·ҫіЎЈАыУГОАРЗөјәҪјјКхЈ¬КТНв¶ЁО»УҰУГИзРРіөөјәҪәНҪфјұҫИФ®өИТСҫӯҙпөҪБЛҪПёЯөДјјКхіЙКм¶ИәНІъТө»ҜЛ®ЖҪЎЈИ»¶шЈ¬ЛжЧЕҫӯјГЙз»бөД·ўХ№ј°ЦЗДЬјТҫУЎўЦЗДЬТҪБЖөИіЎҫ°өДРЛЖ𣬶ЁО»јјКхөДРиЗуЦрҪҘА©Х№өҪКТДЪБмУтЎЈУЙУЪКТДЪ»·ҫіөДёҙФУРФәН¶аҫ¶ЛҘВдөИУ°ПмТтЛШөДҙжФЪЈ¬ОАРЗРЕәЕәЬДСВъЧгИЛГЗ¶ФКТДЪО»ЦГРЕПўөДЧјИ·РиЗуЎЈТтҙЛЈ¬іцПЦБЛ¶аЦЦКТДЪ¶ЁО»јјКхЈ¬Из»щУЪҪУКХРЕәЕЗҝ¶ИЦёКҫЈЁReceived Signal Strength IndicatorЈ¬RSSIЈ©[1-2]Ўў·ЙРРКұјдЈЁTime of FlightЈ¬ToFЈ©[3-4]ЎўөҪҙпКұјдІоЈЁTime Difference of ArrivalЈ¬TDoAЈ©[5-6]ЎўНщ·өКұјдЈЁRound-Trip TimeЈ¬RTTЈ©[7]ЎўөҪҙпҪЗ¶ИЈЁAngle of ArrivalЈ¬AoAЈ©[8-9]ЎўЦёОЖөИөД¶ЁО»јјКхЎЈ
»щУЪRSSI өД¶ЁО»·ҪКҪНЁ№эҪЁБўөзҙЕІЁЛҘјхДЈРНАҙјЖЛгКХ·ў»ъЦ®јдөДҫаАлЈ¬ІўАыУГ¶аёц»щХҫ№№ҪЁ¶аХҫ¶ЁО»ДЈРНЎЈёГ¶ЁО»јјКхөДУЕөгФЪУЪКөПЦјтөҘЈ¬Лг·ЁёҙФУ¶ИөНЈ¬ЗТІ»РиТӘСПёсөДКұјдН¬ІҪЎЈИ»¶шЈ¬ЛьИЭТЧКЬөҪ¶аҫ¶»·ҫіөДУ°ПмЈ¬ФЪКТДЪёҙФУөДОЮПЯ»·ҫіПВЈ¬Жд¶ЁО»Р§№ыІ»АнПлЎЈ»щУЪToF өД¶ЁО»јјКхКЗНЁ№эјЖЛгРЕәЕФЪОЮПЯ»·ҫіЦРҙ«ІҘөДКұјдАҙ№АЛгКХ·ў»ъЦ®јдөДҫаАлЎЈёГ¶ЁО»ДЈРНҪб№№јтөҘЈ¬ө«КөПЦДС¶ИҪПҙуЈ¬ТтОӘРиТӘКХ·ў»ъЦ®јдөДКұјдСПёсН¬ІҪЈ¬ІўЗТРЕәЕҙ«ІҘ№эіМЦРөДХЫЙдЎў·ҙЙдөИОуІо»бөјЦВҫаАлјЖЛгЦРөДОуІоЎЈ»щУЪTDoA өД¶ЁО»јјКхАыУГРЕәЕөДөҪҙпКұјдІоЧчОӘ»щұҫ№ЫІвБҝЎЈПаұИ»щУЪToF өД·Ҫ·ЁЈ¬ЛьұЬГвБЛ¶ФКХ·ў»ъКұјдН¬ІҪөДРиЗуЈ¬ҪөөНБЛ№ӨіМКөПЦөДДС¶ИЎЈИ»¶шЈ¬ФЪёГ·Ҫ·ЁЦРЈ¬ОЮПЯРЕәЕҙ«ІҘЦРҙжФЪөДОуІоИФ»бУ°Пм¶ЁО»ҫ«¶ИЎЈ»щУЪRTT өД¶ЁО»јјКхАаЛЖУЪАЧҙпІвҫаЈ¬НЁ№эІвБҝРЕәЕөДНщ·өКұјдАҙјЖЛгҙ«ІҘҫаАлЎЈХвЦЦ·Ҫ·ЁТӘЗуҪУКХ¶ЛҝмЛЩПмУҰЈ¬¶ЁО»ҫ«¶И»бКЬөҪПөНіПмУҰКұјдөДУ°ПмЎЈ»щУЪAoA өД¶ЁО»·Ҫ·ЁАыУГМмПЯХуБР·ЦұжРЕәЕҙпөҪөДҪЗ¶ИЈ¬ІўАыУГ¶аёц»щХҫҪшРРБӘәП¶ЁО»ЎЈёГ·Ҫ·ЁөДУЕКЖФЪУЪҫ«¶ИёЯЎўЛщРи»щХҫКэБҝҪПЙЩЗТОЮРлКұЦУН¬ІҪЎЈИ»¶шЈ¬ёГ·Ҫ·ЁРЕәЕҪвЛгөДёҙФУ¶ИҪПёЯЈ¬ДСТФККУГУЪёЯІў·ўЎўҙуИЭБҝөДіЎҫ°ЎЈ»щУЪRSSI ЦёОЖөД¶ЁО»јјКхКЗ»щУЪRSSI ¶ЁО»јјКхөДЙэј¶Ј¬НЁ№эМбЗ°ІЙјҜРЕәЕІў№№ҪЁЦёОЖҝвАҙКөПЦ¶ЁО»ЎЈПаұИУЪҙ«НіөДRSSI ¶ЁО»јјКхЈ¬ёГ·Ҫ·ЁҫЯУРёьёЯөД¶ЁО»ҫ«¶ИЎЈИ»¶шЈ¬УЙУЪИОәООЮПЯ»·ҫіөДёДұд¶јРиТӘЦШРВКХјҜЦёОЖЈ¬өјЦВПөНіөДІҝКрәНУҰУГПа¶ФА§ДСЎЈ
ЛжЧЕКТДЪ¶ЁО»јјКхөД·ўХ№Ј¬ПЦУРөД¶ЁО»ПөНіНЁіЈІЙУГ¶аЦЦјјКхөДИЪәПТФМбёЯҫ«¶ИЎЈИ»¶шЈ¬өұЗ°өДКТДЪ¶ЁО»БмУтИФҙжФЪТ»Р©ОКМвЎЈКЧПИЈ¬Рн¶аПИҪшөД¶ЁО»ПөНіКЗ»щУЪ·юОсЖч¶Л¶ш·ЗЦХ¶ЛЙиұёЈ¬ҙжФЪРЕПўР№В¶·зПХЈ¬ІўЗТДСТФЦ§іЦёЯІў·ўәНҙуИЭБҝіЎҫ°ЎЈЖдҙОЈ¬ҙу¶аКэ¶ЁО»ПөНіЦ»ДЬФЪ¶юО¬ЖҪГжЙПҪшРР¶ЁО»Ј¬¶шЛжЧЕ»щУЪО»ЦГ·юОсөДУҰУГРиЗуФцјУЈ¬¶ФУЪ3D ¶ЁО»өДРиЗуТІИХТжФц¶аЎЈАэИзЈ¬ФЪЦЗДЬјТҫУәНСшАПФәөИіЎҫ°ЦРЈ¬РиТӘ¶ФәўЧУәНАПИЛҪшРР°ІИ«ја»ӨЈ»ФЪҙуРНЙМі¬өДөјәҪәНЦЗ»ЫІЦҙўөИіЎҫ°ЦРЈ¬РиТӘ¶ФОпЖ·ҪшРРөҘХҫөД3D ¶ЁО»ЎЈҙЛНвЈ¬»щУЪЙдЖөК¶ұрјјКхЈЁRadio Frequency IdentificationЈ¬RFIDЈ©ЎўА¶САЎўі¬ҝнҙшЈЁUltra Wide BandЈ¬UWBЈ©өИПөНіөД¶ЁО»јјКхРиТӘ¶оНвөДУІјюЙиұёЈ¬ФцјУБЛІҝКріЙұҫЎЈ
ОӘБЛҪвҫцЙПКцОКМвЈ¬ұҫОДМбіцБЛТ»ЦЦ»щУЪ5GЦХ¶ЛөД3D ¶ЁО»јјКхЈ¬ід·ЦАыУГБЛ5G »щХҫөДЖХј°әН5G »щХҫМмПЯХуБРөДУЕКЖЎЈұҫОДМбіцөДјјКхАыУГХэҪ»ЖҘЕдЧ·ЧЩЛг·ЁЈЁOrthogonal Matching PursuitЈ¬OMPЈ©[10]ФЪ5G ЦХ¶ЛЙПјЖЛг»щХҫ·ўіцРЕәЕөДАлҝӘ·ҪО»ҪЗәНАлҝӘСцҪЗЎЈЛжәуЈ¬НЁ№эМбіцөДЦұЙдВ·ҫ¶К¶ұрЛг·ЁЈ¬И·¶ЁАҙЧФБҪёц»щХҫөДИэО¬В·ҫ¶Ј¬ІўАыУГБҪёц»щХҫөДИэО¬ЦұЙдВ·ҫ¶әНTDoA №№ҪЁ¶ЁО»ДЈРНЈ¬ҙУ¶ш»сөГЦХ¶ЛөДО»ЦГРЕПўЎЈҝјВЗөҪФЪ3D ҝХјдЦРБҪМхЙдПЯІ»Т»¶Ё»бУРИ·¶ЁөДҪ»өгЈ¬ұҫОДТэИл»щУЪТЕҙ«Лг·ЁЈЁGenetic AlgorithmЈ¬GAЈ©[11]өДДҝұкО»ЦГЛСЛчЛг·ЁЈ¬ТФУЕ»ҜЗуҪвЎЈ
ұҫОДөДЧоЦчТӘ№ұПЧ°ьАЁЈә
ЈЁ1Ј©ЛщМбіцөДјјКх»щУЪ5G ЦХ¶ЛҪшРР¶ЁО»Ј¬УРР§ұЬГвБЛТюЛҪР№В¶өД·зПХЎЈНЁ№эФЪЦХ¶ЛЙиұёЙПҪвЛгҪЗ¶ИРЕПўЈ¬ҝЙТФјхЙЩ»щХҫ¶ЛөДІў·ўҙҰАнЈ¬ҙУ¶шјхЗбПөНіөДёәөЈЎЈҙЛНвЈ¬УЙУЪУлНЁРЕНшВзөДТ»Ме»ҜЈ¬ёГјјКх»№ДЬ№»ҪөөНПөНіөДІҝКріЙұҫЎЈ
ЈЁ2Ј©ұҫОДМбіцБЛТ»ЦЦБӘәП¶ЁО»ДЈРНЈ¬АыУГАлҝӘ·ҪО»ҪЗЎўАлҝӘСцҪЗәНөҪҙпКұјдІоөИ¶аёцІОКэҪшРР¶ЁО»ЎЈН¬КұЈ¬ТэИлЦұЙдВ·ҫ¶К¶ұрЛг·ЁАҙИ·¶Ё»щХҫөҪЦХ¶ЛөДЦұЙдВ·ҫ¶ЎЈҙЛНвЈ¬ОӘБЛУЕ»ҜЗуҪвЈ¬ұҫОД»№МбіцБЛ»щУЪТЕҙ«Лг·ЁөДЦЗДЬЛСЛчЛг·ЁЈ¬УГУЪ»сИЎДҝұкО»ЦГөДёьЧјИ·ҪвЎЈ
ЈЁ3Ј©ұҫОДК№УГMATLAB ҪшРРБЛ·ВХжКөСйЈ¬ТФҫЯУР4 МмПЯЧйіЙГжХуМмПЯХуБРөД5G »щХҫОӘАэЈ¬№№ҪЁБЛРЕәЕҙ«ІҘДЈРНЈ¬ІўҪшРРБЛ¶ЁО»ІвКФЎЈ·ВХжҪб№ыПФКҫЈ¬ЛщМбіцөД¶ЁО»јјКхҝЙТФКөПЦ1.12 m өД3D ¶ЁО»ҫ«¶ИЈ¬СйЦӨБЛёГјјКхөДУРР§РФЎЈ
1 »щУЪ5G ЦХ¶ЛөДКТДЪ3D ¶ЁО»
ұҫОДМбіцөДПөНіөДБчіМИзНј1 ЛщКҫЎЈёГПөНіАыУГБҪёцТСЦӘО»ЦГөД5G »щХҫЈ¬Гҝёц»щХҫ¶јУЙ4 ёцМмПЯЧйіЙөДҫщФИГжХуХуБР·ўЛНЙдЖөРЕәЕЎЈЦХ¶ЛҪУКХРЕәЕЈ¬ІўК№УГі¬·ЦұжЛг·ЁјЖЛгіцЙдЖөРЕәЕөДАлҝӘ·ҪО»ҪЗәНАлҝӘСцҪЗЎЈИ»әуЈ¬АыУГХвР©ҪЗ¶ИРЕПўҪЁБўјёәО¶ЁО»ДЈРНЈ¬ІўҪбәПTDoAҪшРРФјКшЈ¬ТФИ·¶ЁДҝұкО»ЦГЎЈЧоәуЈ¬МбіцБЛ»щУЪТЕҙ«Лг·ЁөДДҝұкО»ЦГЛСЛчЛг·ЁЈ¬УГУЪЗуҪвДҝұкО»ЦГЎЈПВГжПкПёҪйЙЬ¶ЁО»№эіМЎЈ
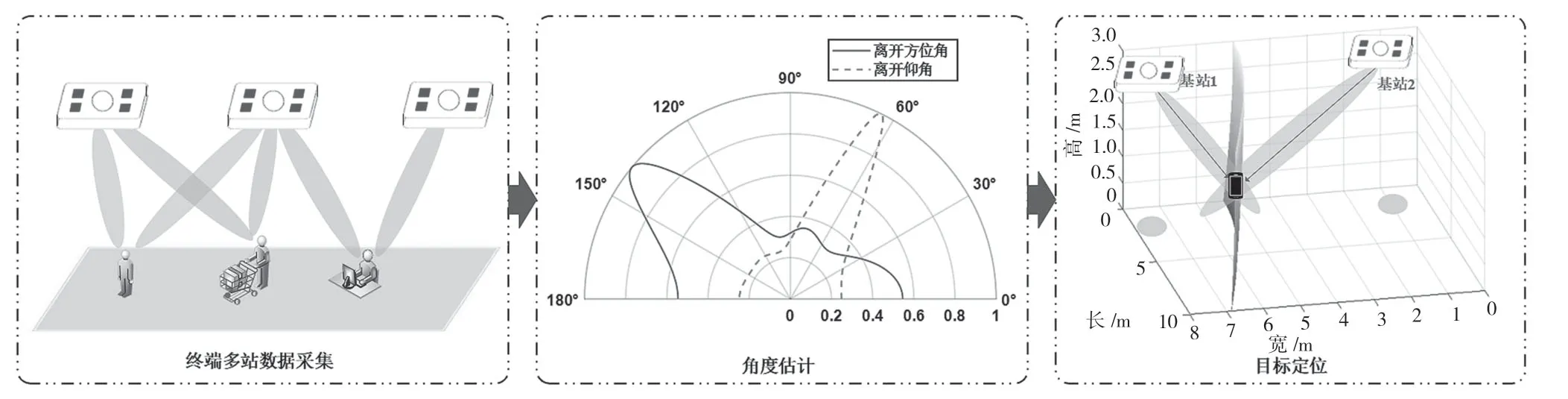
Нј1 ¶ЁО»БчіМ
ЈЁ1Ј©ҪЗ¶И№АјЖЎЈКЧПИҪЁБў»щХҫУлЦХ¶ЛөДНЁРЕБ¬ҪУІўІвБҝ»щХҫөДАҙІЁРЕәЕЈ¬АыУГOMP №АјЖАҙІЁ¶юО¬ҪЗ¶ИЎЈ
ЈЁ2Ј©ЦұЙдВ·ҫ¶К¶ұрЎЈАыУГМбіцөДЦұЙдВ·ҫ¶К¶ұрЛг·Ё¶ФРЕәЕҪшРР·ЦОцЈ¬ТФИ·¶ЁКЗ·сҙжФЪЦұЙдВ·ҫ¶ЎЈёГЛг·ЁДЬ№»К¶ұріцРЕәЕҙ«ІҘ№эіМЦРөДЦұЙдВ·ҫ¶Ј¬ҙУ¶ш°пЦъЧјИ·¶ЁО»ДҝұкЎЈ
ЈЁ3Ј©Дҝұк¶ЁО»ЎЈК№УГБҪёц»щХҫөДЦұЙдВ·ҫ¶№№ҪЁ3D ¶ЁО»ДЈРНЈ¬АыУГБҪёц»щХҫөДTDoA ФјКшДҝұкО»ЦГЈ¬ЧоәуК№УГЛщМбөД»щУЪGA өДЦЗДЬЛСЛчЛг·ЁФЪ3D ҝХјдЦР¶ФДҝұкО»ЦГҪшРРУЕ»ҜЗуҪвДҝұкО»ЦГЎЈ
1.1 ¶юО¬АлҝӘҪЗ№АјЖ
Нј2 Х№КҫБЛҫщФИГжХуХуБРДЈРНЎЈ5G »щХҫЛщ·ўЙдРЕәЕОӘХэҪ»Жө·ЦёҙУГөчЦЖЈ¬ЗТКЗХӯҙшРЕәЕЎЈјЩЙи·ыәПФ¶іЎМхјюЈ¬»щХҫөДМмПЯКэБҝОӘR=2ЎБ2Ј¬ХуБРөДјдҫаОӘm=ҰЛ/2Ј¬ҰЛОӘІЁіӨЎЈЦХ¶ЛҪУКХөҪөЪrёц·ўЙдМмПЯөДРЕәЕҝЙТФұнКҫОӘЈә

Нј2 МмПЯХуБР
КҪЦРЈәxr(t)ОӘҪУКХ¶ЛКХөҪөДөЪrёц·ўЙдМмПЯөДРЕәЕЈ»arәНҰУr·ЦұрОӘҙУ»щХҫөЪrёц·ўЙдМмПЯөҪУГ»§ЦХ¶ЛөДЛҘјхәНҙ«ІҘСУіЩЈ»nr(t)КЗөЪrёцМмПЯөДјУРФёЯЛ№°ЧФлЙщЎЈёщҫЭНј2Ј¬·ўЙдХуБРМмПЯУлФӯөгҙҰМмПЯөДxЦбЎўyЦбәНzЦбЙПөДҫаАлІоҝЙТФұнКҫОӘЈә
БнНвЈ¬·ўЙдРЕәЕҝЙТФұнКҫОӘЈә
јЩЙиҙ«Кд№эіМЦРУРIМх¶аҫ¶Ј¬ФтКҪЈЁ4Ј©ҝЙТФұнКҫОӘЈә
ұҫОДК№УГOMP Лг·ЁҪшРР¶юО¬АлҝӘҪЗ¶И№АјЖЎЈOMP Лг·ЁКЗMP өДА©Х№Ј¬ЖдёДҪшөДәЛРДКЗ¶ФСЎ¶ЁөДФӯЧУҪшРРХэҪ»»ҜЈ¬ХвК№өГЛг·ЁФЪПаН¬өДҫ«¶ИПВКХБІёьјУСёЛЩЎЈІўЗТНЁ№эФӯЧУЦ®јдөДХэҪ»Ј¬Лг·Ё¶Ф¶аҫ¶ИхРЕәЕөДМбИЎ»бёьјУАнПлЎЈФЪІОКэ№АјЖКұЈ¬УЙУЪФЪөдРНөДКТДЪ»·ҫіЦРЈ¬НЁіЈҙжФЪ5Ў«6 Мх¶аҫ¶КэБҝЈ¬ТІХэәГВъЧгБЛOMP Лг·ЁТӘЗуөДПЎКиРФЎЈТтҙЛЈ¬КҪЈЁ5Ј©УлКҪЈЁ6Ј©өДҪвҫНҝЙТФЧӘ»ҜіЙТФПВ·ЗПЯРФФјКшОКМвЈә
КҪЦРЈәҰЕОӘХэФтКҪІОКэЈ»ОӘКөјКВ·ҫ¶өДХжКөІОКэЈ»КЗТ»ёцНкұёөДЧЦөдҫШХуЎЈҝЙТФұнКҫОӘЈә
КҪЦРЈәNУЙAoAЎўEoA ј°ToF өДЛСЛч·¶О§әНЛСЛчІҪіӨҫц¶ЁЈ¬ЖдЦРГҝТ»ёцұ»іЖОӘЦРөДТ»ёцФӯЧУЎЈOMP Лг·ЁЦчТӘУРТФПВјёёцІҪЦиЈә
ЈЁ1Ј©ЙиЦГІРІоv0=XЈ¬ЛчТэјҜ0=∅ҰЈЈ¬ФӯЧУПтБҝ0=∅Ұ«Ј¬ПЎКи¶ИE=LәНөьҙъҙОКэj=1ЎЈ
ЈЁ2Ј©ёьРВЛчТэјҜәНФӯЧУјҜЈ¬ЖдёьРВөД№«КҪОӘЈә
ЈЁ4Ј©ёьРВІРІоvjЈ¬ҝЙТФұнКҫОӘЈә
ЈЁ5Ј©Из№ыөұj>EЈ¬ҫННЈЦ№Лг·ЁөьҙъЎЈ·сФт·ө»ШІҪЦиЈЁ2Ј©ФЩҙОСӯ»·ЎЈ
ФЪЙПКцOMP Лг·ЁЦРЈ¬НЁіЈEОӘКТДЪВ·ҫ¶өДКэБҝЈ¬ЖдҝЙТФІОҝјөдРНКТДЪөДВ·ҫ¶КэБҝЙиЦГОӘ5Ў«6МхЈ¬ТІҝЙТФНЁ№э¶ФРЕәЕҪшРРЖжТмЦө·ЦҪв»сөГЎЈФЪұҫОДЦРҪ«РЕәЕВ·ҫ¶КэБҝ№М¶ЁОӘ6 МхЎЈөұЛг·ЁСӯ»·НкіЙәуЈ¬ФтҝЙТФ»сөГТ»ёцРЕөАЧҙМ¬РЕПўЈЁChannel State InformationЈ¬CSIЈ©°ьЦР¶аҫ¶РЕәЕөДАлҝӘ·ҪО»ҪЗәНАлҝӘСцҪЗөИІОКэөД№АјЖЦөЎЈ
1.2 ЦұЙдВ·ҫ¶К¶ұрЛг·Ё
НкіЙ¶ФВ·ҫ¶өДІОКэ№АјЖТФәуЈ¬ҝјВЗ¶ЁО»ДЈРНКЗАыУГЛ«»щХҫөДЦұЙдВ·ҫ¶№№ҪЁЈ¬ДЗГҙРиТӘФЪ¶аВ·ҫ¶ЦРК¶ұрәНМбИЎЦұЙдВ·ҫ¶Ј¬ТФВъЧг¶ЁО»ДЈРНөДТӘЗуЎЈНЁіЈЈ¬ФЪ»щУЪToF өД¶ЁО»ПөНіЦРЈ¬ҝЙТФК№УГЧо¶МөДToF АҙИ·¶ЁЦұЙдВ·ҫ¶ЎЈө«ҫш¶ФToF өД№АјЖРиТӘКХ·ўЙиұёЦ®јдСПёсөДКұјдН¬ІҪЈ¬ұҫОДЛщМбЛг·ЁОӘБЛК№ПөНіјтөҘЎўТЧІҝКрЈ¬Г»УР№АјЖToFЎЈТтҙЛЈ¬І»ДЬҪ«РЕәЕөДЧо¶МToF ЧчОӘСЎФсЦұЙдВ·ҫ¶өДЕР¶ПМхјюЎЈ
ОӘБЛ»сөГРЕәЕҙ«ІҘөДЦұЙдВ·ҫ¶Ј¬ұҫОДМбіцБЛ»щУЪ¶а°ьҫЫАаәН·ВЙдҙ«ІҘЛг·ЁөДЦұЙдВ·ҫ¶К¶ұрЛг·ЁЎЈёГЛг·Ё»щУЪТФПВФӯАнЈәФЪКУҫа»·ҫіЦРЈ¬ЦұЙдВ·ҫ¶Па¶ФУЪ·ҙЙдВ·ҫ¶ёьОӘОИ¶ЁЎЈНЁ№э¶аёц°ьөДҫЫАаЈ¬ЦұЙдВ·ҫ¶¶ФУҰөДҙШФЪҪЗ¶ИУтЙПұнПЦіцҪПРЎөД¶¶¶ҜЈ¬ұнПЦОӘІОКэөД·ҪІоҪПРЎЗТј«ЦөөгҪП¶аЗТјҜЦРЎЈПа·ҙЈ¬·ҙЙдВ·ҫ¶ФЪҪЗ¶ИУтЙПөДұнПЦУлЦұЙдВ·ҫ¶Па·ҙЈ¬ТтОӘРЕәЕөД·ҙЙдКЗЛж»ъЗТІ»ОИ¶ЁөДЈ¬·ҙЙдВ·ҫ¶»бұнПЦіцҪПҙуөДІЁ¶ҜәНІ»ОИ¶ЁРФЈ¬ХвР©МШХчҝЙТФНЁ№эҪЗ¶ИУтөДІОКэАҙМеПЦЎЈТтҙЛЈ¬НЁ№э¶а°ьҫЫАаәуЈ¬ЦұЙдВ·ҫ¶өДІОКэөД·ҪІо»бҪПҙ󣬶шГҝёцҙШөДј«ЦөөгКэБҝТІҪПЙЩЎЈ»щУЪТФЙПМЦВЫЈ¬ҝЙТФНЁ№эВ·ҫ¶ФЪҝХУтЎўј«ЦөөгКэБҝј°ёчҙШөД·ҪІоөИМШХчАҙЕРұрЦұЙдВ·ҫ¶әН·ҙЙдВ·ҫ¶ЎЈН¬КұЈ¬ФЪҪшРР¶а°ьҫЫАаәуЈ¬ҝЙТФМбИЎГҝёцҙШөДЖҪҫщЦөЧчОӘВ·ҫ¶өДАлҝӘ·ҪО»ҪЗәНАлҝӘСцҪЗЈ¬ТФјхЙЩІОКэ№АјЖОуІоЎЈФЪұҫОДЦРЈ¬КЧПИ¶ФөҘ¶АөД10 ёцКэҫЭ°ьҪшРРІОКэ№АјЖЈ¬ЖдҙО¶ФХв10 ёцКэҫЭ°ьөДІОКэ№АјЖҪб№ыҪшРРҫЫАаЎЈФЪҫЫАаөД»щҙЎЙПЈ¬ұҫОДА©Х№БЛSpotFi[12]ПөНіЦР»щУЪЧоҙуЛЖИ»ҙт·ЦөД·Ҫ·ЁЈ¬Ҫ«АлҝӘСцҪЗЧчОӘәЛРДөДЕРұрТАҫЭЎЈЖдЦРЈ¬ИОТвТ»Мхҙ«ІҘВ·ҫ¶өДөГ·ЦҝЙТФұнКҫОӘЈә
КҪЦРЈәnЈ¬ҰТҰИәНҰТϕ·ЦұрОӘҙ«ІҘВ·ҫ¶¶ФУҰөДҙШөДј«ЦөөгёцКэЎўАлҝӘ·ҪО»ҪЗөД·ҪІоәНАлҝӘСцҪЗөД·ҪІоЈ»wcЈ¬wҰИәНwϕ·ЦұрОӘ¶ФУҰ·ЦЕдёшВ·ҫ¶өДКэБҝЎўАлҝӘСцҪЗөД·ҪІоәНАлҝӘ·ҪО»ҪЗөД·ҪІоөДИЁЦШЦөЈ¬ОӘіЈКэЈ¬УЙҙуБҝКөСйөДНіјЖҪб№ыөГіцЎЈФЪҙЛ»щҙЎЙПЈ¬ЗуИЎГҝТ»ҙШј«ЦөөгөДАлҝӘ·ҪО»ҪЗЎўАлҝӘСцҪЗөДЖҪҫщЦөЧчОӘёГҙШ¶ФУҰВ·ҫ¶ЧоәуөДАлҝӘ·ҪО»ҪЗЎўАлҝӘСцҪЗЈ¬ТФјхЙЩК№УГөҘёц°ь№АјЖҙжФЪөДЛж»ъОуІоЎЈЧоЦХКдіцЛщУРҙШ¶ФУҰВ·ҫ¶өДАлҝӘ·ҪО»ҪЗЎўАлҝӘСцҪЗЎў¶ФУҰВ·ҫ¶»сөГөД·ЦКэЈЁЦГРЕ¶ИЈ©әНЦұЙдВ·ҫ¶Ул·ҙЙдВ·ҫ¶өДЕР¶ЁҪб№ыЈ¬ЖдЦР·ЦКэЧоёЯөДОӘЦұЙдВ·ҫ¶Ј¬ЖдУаОӘ·ҙЙд В·ҫ¶ЎЈ
1.3 Дҝұк¶ЁО»
УЙУЪНЁ№эІОКэ№АјЖөГөҪөДЦұЙдВ·ҫ¶ІОКэҙшУРОуІоЈ¬¶шФЪ3D ҝХјдЦРБҪМхҙшУРОуІоөДЙдПЯІ»Т»¶ЁҙжФЪҪ»өгЈ¬ұҫОДЛщМб¶ЁО»ДЈРНәЬДСөГөҪДҝұкөДИ·¶ЁҪвЎЈТтҙЛЈ¬ОӘБЛ»сөГДҝұкО»ЦГЈ¬Мбіц»щУЪGA өДДҝұкО»ЦГЛСЛчЛг·ЁЎЈGA КЗТ»ЦЦДЈДвФЪЧФИ»»·ҫіЦРөДЙъОпТЕҙ«әНҪш»ҜөД№эіМ¶шРОіЙөДЧФККУҰИ«ҫЦЛСЛчЛг·ЁЎЈGA КЗТ»ЦЦёЯР§ЎўВі°фРФЗҝөДУЕ»ҜЛг·ЁЈ¬Лг·ЁРОіЙөД№эіМЦРҪијшБЛЙъОпҪзТЕҙ«С§ЛөәНҪш»ҜВЫөДПа№ШЦӘК¶Ј¬·Цұрұ»іЖОӘҪ»ІжФЛЛгәНұдТмФЛЛгЈ¬Лг·ЁФЪҪвҝХјдЛСЛчөД№эіМЦР»бЧФ¶Ҝ»сИЎәНАЫјЖУлҪвҝХјдПа№ШөДЦӘК¶Ј¬И»әуККУҰРФөШҝШЦЖЛСЛч№эіМІў»сөГЧоУЕҪвЎЈ
¶ЁО»ДЈРНИзНј1 ЛщКҫЈ¬ОӘБЛГиКц·ҪұгЈ¬ІЙУГБЛөСҝЁ¶ыЧшұк¶ФДҝұкТФј°»щХҫөДО»ЦГҪшРРјт»ҜГиКцЎЈЖдЦРЈ¬»щХҫ1 әН»щХҫ2 өДО»ЦГТСЦӘЈ¬·ЦұрұнКҫОӘB1=[x1,y1,z1]TәНB2=[x2,y2,z2]TЈ¬ДҝұкөДО»ЦГОҙЦӘЈ¬ұнКҫОӘt=[x,y,z]TЎЈОӘБЛҝӘКјGAЈ¬РиТӘёш¶ЁТ»¶ЁКэБҝөДёцМеЈ¬ТІіЖИҫЙ«МеЈ¬јҙДҝұкҪвЈ¬ГҝёцёцМеУЙ»щТт№№іЙЈ¬ЛщУРөДёцМеұ»іЖОӘИәМеЎЈ¶ФУҰФЪөұЗ°Лг·ЁЦРЈ¬ГҝТ»ёцДҝұкҪвұ»іЖОӘТ»ёцИҫЙ«МеЈ¬ДҝұкҪвөД№№іЙФӘЛШФтұ»іЖОӘ»щТтЎЈОӘБЛК№Лг·ЁёьҝмөШКХБІЈ¬БҪёц»щХҫөДTDoA ұ»УГАҙФјКшЛг·ЁөДЛСЛч·¶О§Ј¬јҙДҝұкҪвҝХјдЈ¬ҝјВЗөҪTDoA КЬКТДЪ»·ҫіөДУ°ПмЈ¬ТтҙЛTDoA Ц»УГАҙФјКшҪвҝХјдөД·¶О§Ј¬МбёЯЛг·ЁөДКХБІЛЩ¶ИЈ¬Лг·ЁТФҪЗ¶ИЧчОӘәЛРДЕР¶ПМхјюЎЈИ»әуЈ¬ДҝұкЗшУтҝЙТФНЁ№эХвёц·¶О§әНБҪёц»щХҫөДЦұЙдВ·ҫ¶ҪЗ¶ИАҙҙуЦВИ·¶ЁЎЈИзНј3 ЛщКҫЈ¬ОӘБЛФЪХвёцҙЦВФөДЗшУтДЪҫ«И·ХТөҪДҝұкО»ЦГЈ¬УРТФПВ№ШјьІҪЦиЈә

Нј3 Лг·ЁБчіМ
ЈЁ1Ј©ЙиЦГИәМеКэБҝОӘNЈ¬ІўіхКј»ҜіхКјИәМеЈ¬ұнКҫОӘT=[t1,Ўӯ,tN]Ј¬ЖдЦРёцМеұнКҫОӘti=[xi,yi,zi]Ј¬i=1,Ўӯ,NЈ¬ЙиЦГөьҙъјЖКэЖчg=0Ј¬ұдТмёЕВКPmЈ¬СЎФсТЕҙ«КэБҝLЈ¬Ҫ»ІжёЕВКPcЈ¬ЧоҙуҪш»ҜҙъКэGЎЈ
ЈЁ2Ј©ёцМеЖАјЫЎЈёщҫЭККУҰРФәҜКэјЖЛгИәМеЦРёцМеөДККУҰ¶ИІўЕЕРтЎЈУЙУЪҪЗ¶ИКЗЧоЦчТӘөДФјКшМхјюЈ¬TDoA ЧчОӘҙОТӘөДФјКшМхјюЈ¬ТтҙЛМбіц»щУЪИЁЦШөДЕР¶Ё·ҪКҪЈ¬·ЦұрёшҪЗ¶ИІоЦ®әНУлTDoA ІоЦ®әНёіУиІ»Н¬өДИЁЦШҰШ1әНҰШ2Ј¬ДЗГҙҝЙТФҪ«ХвёцУЕ»ҜОКМвРҙОӘЈә
КҪЦРЈәҰӨ1әНҰӨ2·ЦұрұнКҫҪЗ¶ИІоәНTDoA ІоЦөЎЈҰӨ1ҝЙТФұнКҫОӘЈә
КҪЦРЈәҰө1УлҰө2·ЦұрұнКҫөұЗ°ЛСЛчО»ЦГПа¶ФУЪ»щХҫ1 әН»щХҫ2 О»ЦГЛщөГөДҪЗ¶ИУлІОКэ№АјЖҪЗ¶ИЦ®јдөДІоЦөЈ»ҰИ1Ул·ЦұрұнКҫЦХ¶Л№АјЖөГөҪ»щХҫ1 өДАлҝӘ·ҪО»ҪЗәНөұЗ°ЛСЛчО»ЦГУл»щХҫ1 өДПа¶ФО»ЦГЛщјЖЛгөГөҪөДАлҝӘ·ҪО»ҪЗЈ»ϕ1Ул·ЦұрұнКҫЦХ¶Л№АјЖөГөҪ»щХҫ1 өДАлҝӘСцҪЗәНөұЗ°ЛСЛчО»ЦГУл»щХҫ1 өДПа¶ФО»ЦГЛщјЖЛгөГөҪөДАлҝӘСцҪЗЈ»||ЎӨ||1ұнКҫОӘ1-·¶КэЎЈКҪЦРҰө2өДјЖЛг·ҪКҪУлҰө1ПаЛЖЎЈҰӨ2ҝЙТФұнКҫОӘЈә
КҪЦРЈәcОӘ№вЛЩЈ»||ЎӨ||2ұнКҫОӘ2-·¶КэЈ»d1Улd2·ЦұрұнКҫөұЗ°ЛСЛчО»ЦГөҪ»щХҫөДҫаАлЎЈ
ЈЁ3Ј©Ҫ»ІжФЛЛгЎЈФЪЦЦИәЦРСЎФсіЙ¶ФөДёцМеЈ¬ТФТ»¶ЁөДёЕВКҪ»»»ЛьГЗЦ®јдөДІҝ·ЦИҫЙ«МеЈ¬ІъЙъРВөДёцМеЈ¬јҙөұСЎФсБҪёцёцМеКұЈ¬ІъЙъТ»ёц[0,1]Ц®јдөДЛж»ъКэЈ¬ИфЛж»ъКэРЎУЪҪ»ІжёЕВКЦөЈ¬Фт¶ФёцМеҪшРРІҝ·ЦИҫЙ«МеҪ»»»Ј¬ЖдЦРДіёц»щТт·ўЙъҪ»»»ТІКЗЛж»ъҪшРРЎЈ·ҙЦ®Ј¬ИфЛж»ъКэҙуУЪҪ»ІжёЕВКЦөЈ¬ФтІ»·ўЙъҪ»»»ЎЈ
ЈЁ4Ј©ұдТмФЛЛгЎЈНЁ№эЦЦИәКэБҝУлұдТмёЕВКјЖЛгұдТмёцМеөДКэБҝІўЛж»ъСЎФсұдТмөДёцМеЈ»СЎ¶ЁұдТмёцМеЦ®әуЈ¬Лж»ъ¶ФЖдЦРөДІҝ·Ц»щТтСЎФсұдТмЈ¬ФЪұҫОДЦРЈ¬»щТтөДұдТмКЗФЪ¶ФУҰҪвҝХјдЦРІъЙъТ»ёцЛж»ъКэЧчОӘұдТмЦөЎЈ
ЈЁ5Ј©СЎФсФЛЛгЎЈұЈБфөұЗ°ИәМеЦРЧоУЕөДЗ°LёцёцМеөҪПВТ»ҙъИәМеЦРЈ¬Лж»ъФЪПВТ»ҙъИәМеЦРСЎФсLёцёцМеІўҪшРРМж»»ЎЈ
ЈЁ6Ј©ЦРЦөМхјюЕР¶ПЎЈұҫОДЦРөДЦРЦөМхјюОӘБҪЦЦЎЈөЪ1 ЦЦЙиЦГБЛКХБІЦөЈ¬өұёцМеЧојСККУҰ¶ИЦөРЎУЪКХБІЦөКұЈ¬ФтНЈЦ№өьҙъІўКдіцЧојСККУҰ¶ИЦөөДёцМеЧчОӘЧоУЕҪвЎЈөЪ2 ЦЦОӘg>GКұЈ¬НЈЦ№өьҙъЈ¬КдіцХыёцҪш»Ҝ№эіМЦРЧојСККУҰ¶ИЦөЧчОӘЧоУЕҪвКдіцЈ¬·ҙЦ®Фтg=g+1ЎЈ
2 РФДЬЖА№А
2.1 КөСйЙиЦГ
ұҫОДК№УГMATLAB 2022b №№ҪЁБЛТ»ёцөдРНөДКТДЪіЎҫ°ДЈРНЈ¬ДЈРНҙуРЎОӘ8ЎБ14ЎБ3 m3Ј¬ИзНј4 ЛщКҫЎЈ·ВХжЙиЦГБҪёц5G РЎ»щХҫЈ¬Чшұк·ЦұрОӘBS1=[0,14,3]TЈ¬BS2=[8,14,3]TЎЈ·ВХжЙиЦГЖөВКОӘ10 GHzЈ¬ҙшҝнОӘ200 MHzЈ¬·ВХжРЕФлұИОӘ5 dBЎЈ
2.2 ҪЗ¶ИОуІо
ұҫОДФЪДҝұк¶ЁО»КөПЦЦ®З°ҪшРРБЛҪЗ¶И·ВХжЖА№АКөСйЈ¬ІўөГөҪБЛИзНј5 ЛщКҫөДҪб№ыЈ¬ЖдЦРCDFs ОӘАЫ»э·ЦІјәҜКэЦөЎЈКөСйЦРЈ¬К№УГБЛ4ёцМмПЯ·ўЛНРЕәЕЈ¬ІўК№УГЦХ¶ЛөДөҘёцМмПЯҪшРРҪУКХЎЈКөСйҪб№ыПФКҫЈ¬АлҝӘ·ҪО»ҪЗөДЦРЦөОуІоОӘ6.18ЎгЈ¬АлҝӘСцҪЗөДЦРЦөОуІоОӘ6.25ЎгЎЈХвұнГчЛщМбіцөДҪЗ¶ИІвБҝ·Ҫ·ЁФЪҪцК№УГУРПЮМмПЯҪшРРРЕәЕҙ«КдөДЗйҝцПВЈ¬ИФДЬЧјИ·ІвБҝҪЗ¶ИЈ¬ОӘәуРшДҝұк¶ЁО»өДҝЙРРРФМṩБЛУРБҰЦ§іЦЎЈ
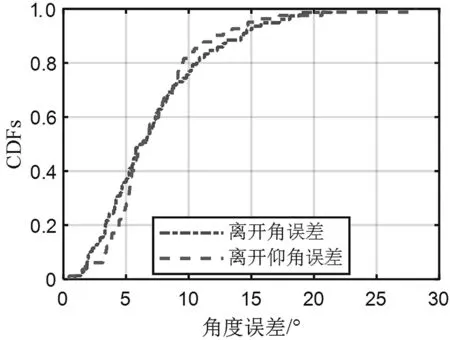
Нј5 ҪЗ¶ИОуІо
2.3 ЧЬМе¶ЁО»ОуІо
ұҫОДК№УГMATLAB ¶ФКТДЪХжКө»·ҫіҪшРРҪЁДЈЈ¬ІўҪшРРБЛКТДЪ¶ЁО»өД·ВХжКөСйЎЈҪб№ыИзНј6 ЛщКҫЎЈФЪ2D ЖҪГжЙПҪшРР¶ЁО»КұЈ¬ЦРЦө¶ЁО»ОуІоОӘ0.92 mЎЈ¶шФЪ3DҝХјдЦРҪшРР¶ЁО»КұЈ¬ЦРЦө¶ЁО»ОуІоОӘ1.12 mЎЈ·ВХжҪб№ыід·ЦЦӨГчБЛұҫОДМбіцЛг·ЁөДҝЙРРРФәНУРР§РФЈ¬ДЬ№»ВъЧгКөјКУҰУГөДРиЗуЎЈ
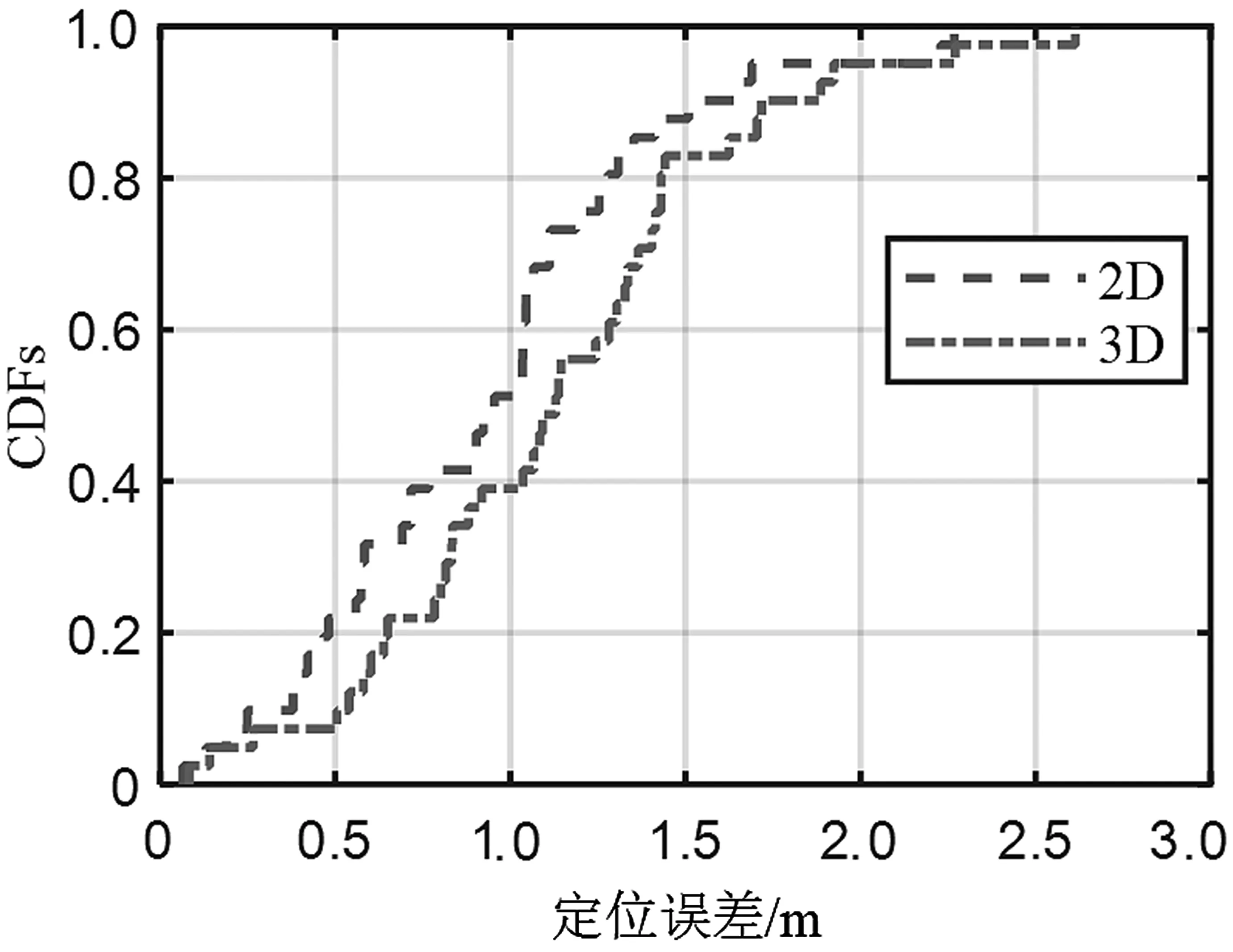
Нј6 ЧЬМе¶ЁО»ОуІо
2.4 У°ПмТтЛШ·ЦОц
2.4.1 РЕФлұИ¶Ф¶ЁО»ҫ«¶ИөДУ°Пм
ОӘБЛСйЦӨұҫОДЛщМбіцөДЛг·ЁФЪІ»Н¬РЕФлұИЗйҝцПВөД¶ЁО»ҫ«¶ИЈ¬ҪшРРБЛТ»ПөБРКөСйІўөГөҪБЛНј7 ЦРөД¶ЁО»Ҫб№ыЎЈКөСйЦРЙиЦГБЛРЕФлұИҙУ-5 dB өҪ15 dB өДІ»Н¬ЗйҝцЎЈҪб№ыПФКҫЈ¬ЛжЧЕРЕФлұИөДФцјУЈ¬¶ЁО»ОуІоЦрҪҘјхРЎЎЈФЪРЕФлұИОӘ-5 dB КұЈ¬ЦРЦө¶ЁО»ОуІоОӘ1.53 mЈ»ФЪРЕФлұИОӘ5 dB КұЈ¬ЦРЦө¶ЁО»ОуІоОӘ1.12 mЈ»ФЪРЕФлұИОӘ15 dB КұЈ¬ЦРЦө¶ЁО»ОуІоОӘ0.78 mЎЈХвКЗТтОӘЛжЧЕРЕФлұИөДФцҙуЈ¬Лж»ъФлЙщјхРЎЈ¬ҪЗ¶ИІвБҝөДОуІоұдРЎЈ¬ТтҙЛЈ¬¶ЁО»ОуІоҪөөНЎЈКөСйұнГчјҙК№ФЪөНРЕФлұИөДЗйҝцПВЈ¬ұҫОДМбіцөДЛг·ЁИФДЬФЪ3D ҝХјдЦРКөПЦҪПәГөД¶ЁО»ҫ«¶ИЎЈ
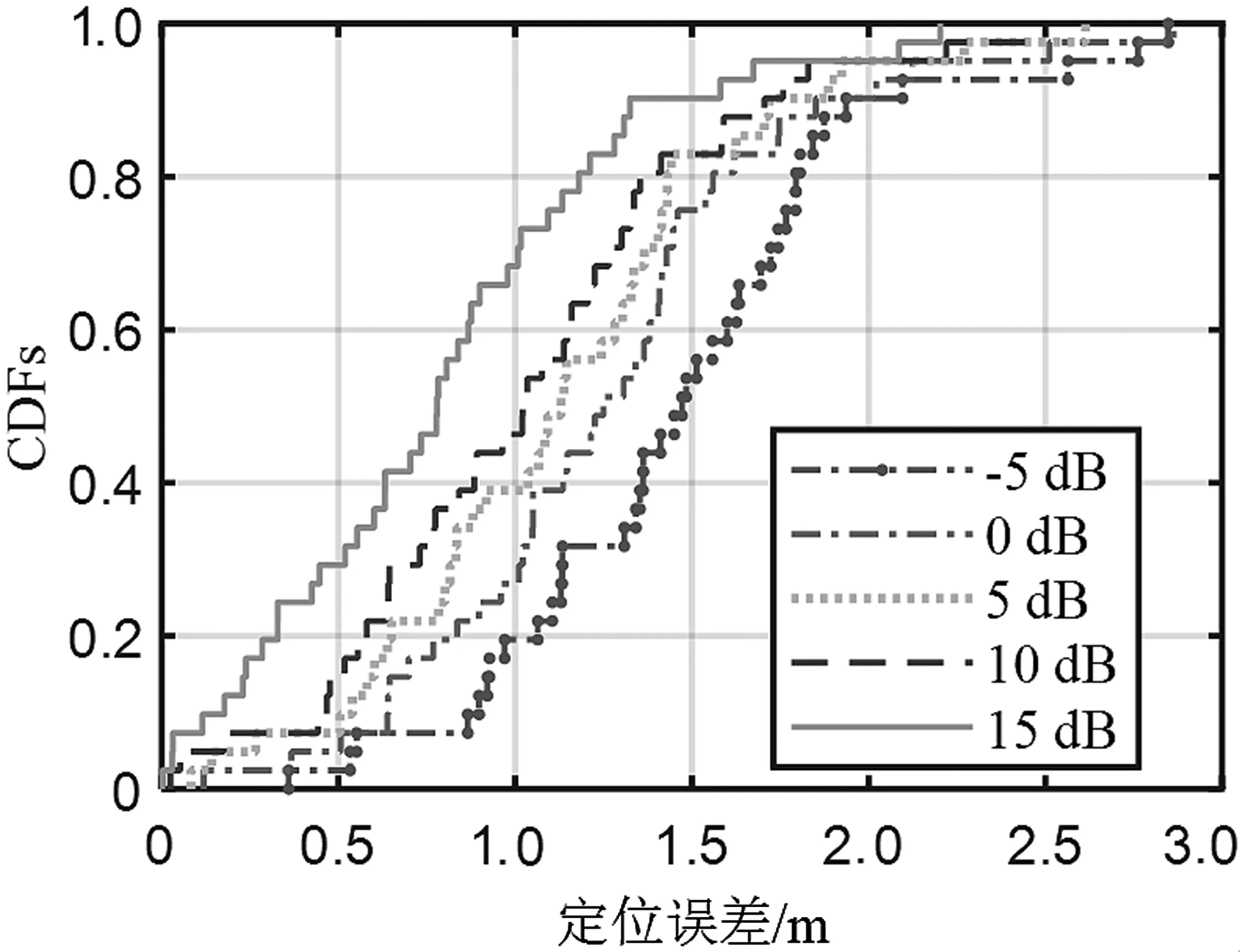
Нј7 І»Н¬РЕФлұИ¶ЁО»ҫ«¶И¶ФұИ
2.4.2 МмПЯКэБҝ¶Ф¶ЁО»ҫ«¶ИөДУ°Пм
ҝјВЗөҪМмПЯКэБҝ¶ФҪЗ¶ИІвБҝҫ«¶ИәН¶ЁО»ҫ«¶ИөДУ°ПмЈ¬КөСйЦРІЙУГБЛ4 ёцЎў6 ёцәН8 ёцМмПЯҪшРРРФДЬСйЦӨЎЈҪб№ыИзНј8 ПФКҫЈ¬ФЪК№УГ4 ёцМмПЯҪшРР¶ЁО»КұЈ¬3D ҝХјдЦРөДЦРЦө¶ЁО»ОуІоОӘ1.12 mЎЈөұМмПЯКэБҝОӘ6 ёцКұЈ¬ЦРЦө¶ЁО»ОуІоОӘ0.91 mЎЈФцјУөҪ8 ёцМмПЯКұЈ¬ОуІоҪшТ»ІҪҪөөНЦБ0.69 mЎЈУЙҙЛҝЙјыЈ¬ФцјУМмПЯКэБҝҝЙТФМбёЯҪЗ¶ИІвБҝөДҫ«¶ИЈ¬ІўҪш¶шМбёЯ¶ЁО»өДҫ«¶ИЎЈө«јҙК№Ц»К№УГ4 ёцМмПЯЈ¬ұҫОДМбіцөДЛг·ЁИФДЬФЪ3D ҝХјдЦРКөПЦҝЙҪУКЬөД¶ЁО»ҫ«¶ИЎЈ
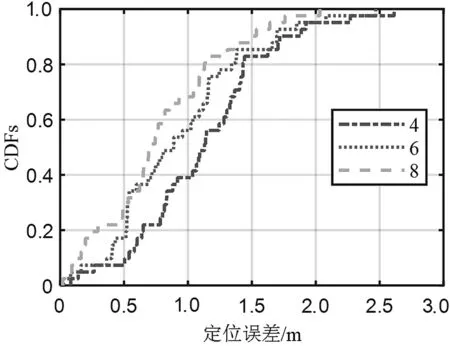
Нј8 І»Н¬МмПЯКэБҝ¶ЁО»ҫ«¶И¶ФұИ
3 ҪбУп
ұҫОДМбіцБЛТ»ЦЦ»щУЪ5G РЎ»щХҫөДЦХ¶Л3D ¶ЁО»Лг·ЁЈ¬ёГЛг·ЁҫЯУРТФПВУЕөгЈәЈЁ1Ј©НЁ№эФЪЦХ¶ЛҪшРР¶ЁО»Ј¬ҝЙТФУРР§ұЬГвУГ»§РЕПўР№В¶Ј¬ІўјхЗб»щХҫ¶ЛөДёәФШЈ»ЈЁ2Ј©НЁ№э№АјЖАлҝӘ·ҪО»ҪЗәНАлҝӘСцҪЗЈ¬№№ҪЁБЛККУГУЪ3D ҝХјдөДјёәО¶ЁО»ДЈРНЈ¬ІўАыУГTDoA ¶ФҪвҝХјдҪшРРФјКшЎЈИ»¶шЈ¬УЙУЪ·ҪіМКЗЗ·¶ЁөДЈ¬ТтҙЛұҫОДМбіцБЛ»щУЪGA өДДҝұкО»ЦГЛСЛчЛг·ЁЈ¬ТФНкіЙДҝұкөД¶ЁО»ЎЈ·ВХжКөСйөДҪб№ыұнГчЈ¬ұҫОДМбіцөДЛг·ЁФЪКТДЪ3D ҝХјдЦРҝЙТФУРР§ҪвҫцДҝұкөД¶ЁО»ОКМвЎЈОҙАҙөД№ӨЧчҪ«°ьАЁКөјКіЎҫ°ІвКФЈ¬ТФСйЦӨЛг·ЁФЪКөјК»·ҫіЦРөДРФДЬұнПЦЈ¬ІўҪшТ»ІҪ·ЦОцЦХ¶ЛМмПЯЧЛМ¬¶Ф¶ЁО»Ҫб№ыөДУ°ПмТФВъЧгІ»Н¬УҰУГіЎҫ°өДРиЗуЎЈ