ГЧКӨҝӯЈ¬НхәмҪӯ
ЈЁЦРНЁ·юЧЙСҜЙијЖСРҫҝФәУРПЮ№«ЛҫЈ¬ҪӯЛХ ДПҫ© 210019Ј©
0 Тэ СФ
іөБӘНшКЗ№№іЙҪ»НЁМеПөөД№ШјьТ»»·Ј¬НЁ№эҪ«іөУлНшВзБ¬ҪУЈ¬ҝЙТФОӘіөДЪөДІҝ·ЦОпМеМṩȫ·ҪО»өДРЕПўЎЈФЪіөБӘНшЦРЈ¬іөУліөЈЁVehicle-to-VehicleЈ¬V2VЈ©Ц®јдөДНЁРЕіРөЈЧЕјаІвіөБҫО»ЦГЎўТЖ¶ҜЛЩ¶ИЎўЦЬұЯ»·ҫіөИИООсЎЈИХТжёҙФУөДіөБӘНш»·ҫіәНІ»¶ПФціӨөД¶ҜМ¬ТөОсРиЗуёшіөУГіөБҫБҙВ·ЦРЦШТӘРЕПўөД°ІИ«ҙ«КдҙшАҙБЛРВөДМфХҪЈ¬ИзәОФЪіөБӘНшЦР¶ФіөУГНЁРЕБҙВ·ЦРөД№ШјьРЕПўҪшРРёЯР§ЎўҝЙҝҝөДҙ«өЭЈ¬КЗДҝЗ°ШҪҙэҪвҫцөДОКМв[1]ЎЈОӘМбёЯіөБӘНшОЮПЯНЁРЕөДҝЙҝҝРФЈ¬Па№ШБмУтСРҫҝИЛФұҪшРРБЛЙоИлөДСРҫҝЈ¬ІўМбіцТ»ЦЦ»щУЪ·дОСіөБӘНшјјКхөДРВРНПВРРОЮПЯНЁРЕЧКФҙ·ЦЕд·Ҫ·ЁЎЈЛдИ»ёГ·Ҫ·ЁФЪТ»¶ЁіМ¶ИЙПМбЙэБЛНЁРЕҙ«КдБҙВ·өДЧЬЛЩВКЎўҪөөНБЛКұСУЈ¬ө«ОЮ·ЁВъЧгёҙФУөД¶ҜМ¬·юОсРиТӘЈ¬ЗТіЙұҫҪПёЯЈ¬І»ККУГУЪКөКұұд»ҜөДіөБӘНшіЎҫ°[2]ЎЈХл¶ФХвТ»ОКМвЈ¬ОДХВҙУЧКФҙөДәПАн·ЦЕдҪЗ¶Иіц·ўЈ¬ҪбәП5G НшВзјјКхЈ¬ҝӘХ№іөБӘНшПВРРОЮПЯНЁРЕЧКФҙ·ЦЕд·Ҫ·ЁөДСРҫҝЈ¬МбіцТ»ЦЦ»щУЪ5G НшВзјјКхөДіөБӘНшПВРРОЮПЯНЁРЕЧКФҙ·ЦЕд·Ҫ·ЁЈ¬ТФМбЙэНЁРЕЧКФҙөДАыУГјЫЦөәНАыУГВКЎЈ
1 »щУЪ5G НшВзјјКх№№ҪЁіөБӘНшПВРРОЮПЯНЁРЕЧКФҙёРЦӘДЈРН
іөБӘНшПВРРОЮПЯНЁРЕЧКФҙёРЦӘДЈРНөД№№ҪЁ»щУЪ5G НшВзјјКхЎЈ5G НшВзјјКхҫЯУРКэҫЭҙ«КдЛЩ¶ИҝмЎўёІёЗГж№гөИУЕКЖ[3]ЎЈН¬КұЈ¬5G НшВзјјКхКұСУөНЈ¬¶ФіөБҫәНЦХ¶ЛөДПмУҰСёЛЩЈ¬КЗКөПЦіөБӘНш·юОсҝмЛЩЎўёЯР§ЎўҝЙҝҝөД№ШјьЎЈФЪіөБӘНшПВРРОЮПЯНЁРЕЧКФҙёРЦӘЦРУҰУГ5G НшВзјјКхЈ¬ҝЙТФёщҫЭҙшҝнЧКФҙ№АјЖҫаАлёРЦӘҫ«¶ИЎЈіөБҫУГ»§ЦХ¶ЛөДҫаАлёРЦӘҫ«¶ИәН·ЦЕдөДёРЦӘЧКФҙјЖЛ㹫КҪОӘ
КҪЦРЈәҰӨlk(W1)ұнКҫіөБҫУГ»§ЦХ¶ЛөДҫаАлёРЦӘҫ«¶ИЈ»cұнКҫ№вЛЩЈ¬ИЎЦөОӘұнКҫіөБӘНшПВРРОЮПЯНЁРЕ»щХҫөДёРЦӘРЕәЕРЕФлұИЈ»W1ұнКҫЖөЖЧЧКФҙ·ЦЕдұИАэЎЈ
НЁРЕДЈКҪ·ЦОӘЦұҪУНЁРЕДЈКҪУлЦРјМНЁРЕДЈКҪЎЈЖдЦРЈ¬ЦұҪУНЁРЕДЈКҪКЗ»щХҫНЁ№эіөБҫөҪНшВзЈЁVehicleto-NetworkЈ¬V2NЈ©БҙВ·ҪшРРКэҫЭҙ«Кд[4]ЎЈХл¶ФіөФШЙиұёөДФЛ¶ҜМШөгЈ¬јЩЙиіөБҫУГ»§ЦХ¶ЛәН»щХҫЦ»ДЬ»сИЎҪПҙу·¶О§өДРЕөАФцТжРЕПўЈ¬ФЪҪшРРКэҫЭҙ«КдКұЈ¬РиТӘИ·¶ЁЧКФҙ·ЦЕдЛЩВКЎЈЦРјМНЁРЕДЈКҪЦёКэҫЭПИНЁ№эЦРјМҙ«КдЈ¬И»әуНЁ№эV2N БҙВ·ЦұҪУҙ«КдөҪЦХ¶ЛЈ¬ЗТV2VБҙВ·ҝЙТФ¶ФЧКФҙҪшРРёҙУГЎЈ
2 іөБӘНшіөБҫ·ЦҙШ
УЙУЪіөБҫөДТЖ¶ҜМШРФЈ¬УЙV2VЎўV2N өИБҙВ·№№ҪЁөДНшВзОИ¶ЁРФҪПІоЈ¬У°ПмәуРшБҙВ·ЧКФҙЕдЦГІЯВФөДРФДЬЎЈОӘҪвҫцХвТ»ОКМвЈ¬ОДХВДвІЙУГ5G НшВзјјКх»сИЎіөБҫО»ЦГРЕПўәНФЛРРЛЩ¶ИЈ¬ФӨІвіөБҫФЪДіТ»КұҝМөДТЖ¶ҜЗйҝцІўҪшРР·ЦЧйЈ¬·ЦОціөБҫөДТЖ¶ҜМШРФЎЈёщҫЭ·ЦОцөДТЖ¶ҜМШРФСЎФсНЁРЕ·ҪКҪЈ¬ҙУ¶ш№№ҪЁТ»МхОИ¶ЁөДНЁРЕБҙ[5]ЎЈёщҫЭ»щУЪ5G НшВзјјКхөДіөБӘНшПВРРОЮПЯНЁРЕЧКФҙёРЦӘДЈРН№АјЖөДО»ЦГРЕПўЈ¬јЖЛгөұЗ°КұҝМөД№АјЖЛЩ¶ИЈ¬№«КҪОӘ
КҪЦРЈәvұнКҫөұЗ°КұҝМөД№АјЖЛЩ¶ИЈ»lkұнКҫөұЗ°КұҝМҫЯУРТ»¶ЁОуІоөДіөБҫУГ»§ЦХ¶ЛО»ЦГРЕПўЈ»lk-1ұнКҫЗ°Т»КұҝМіөБҫУГ»§ЦХ¶ЛО»ЦГРЕПўЈ»ҰӨtұнКҫКұјдІоЎЈёщҫЭ№АјЖЛЩ¶ИvәНЗ°Т»КұҝМөДО»ЦГРЕПўlk-1Ј¬јЖЛгіцөұЗ°КұҝМөДО»ЦГРЕПўәНИәјҜКұјдјдёфЎЈИәјҜКұјдјдёфКЗЦёҪ«іөБҫУГ»§ЦХ¶ЛөДО»ЦГРЕПўКУОӘТ»ПөБРАлЙўөДөгЈ¬ХвР©өгЦ®јдөДКұјдјдёфҫНКЗИәјҜКұјдјдёфЈ¬ТтҙЛҝЙТФНЁ№эјЖЛгјҜИәКұјдјдёфЈ¬ФӨІвіөБҫЦХ¶ЛөДО»ЦГРЕПўЎЈёщҫЭ»сИЎөДіөБҫ¶ЁО»РЕПўҪб№ыјҜЈ¬¶ФіөБҫҪшРРИәЧй»®·ЦЈ¬ІўИ·¶ЁИәЧйЦРөДіөБҙЎЈФЪtКұҝМЈ¬іөБҫ·ЦҙШҪб№ыҝЙұнКҫОӘ
КҪЦРЈәCұнКҫ·ЦҙШҪб№ыЈ»ClusterұнКҫ·ЦҙШәҜКэЈ»LұнКҫіөБҫЦХ¶ЛО»ЦГРЕПўЈ»PұнКҫіөБҫУГ»§ЙиұёЈЁVehicle User EquipmentЈ¬VUEЈ©өҪ»щХҫөДҪУКХ№ҰВКЎЈ
ПЦУРөДіөБӘНшіөБҫ·ЦҙШ·Ҫ·ЁУР2 ЦЦЎЈТ»ЦЦКЗ»щУЪҫаАлөДҫЫАаЛг·ЁЈ¬ёщҫЭіөБҫјдөДҫаАлҪ«іөБҫҫЫАаіЙТ»¶ЁКэДҝөДҫЫАаЎЈө«ёГ·Ҫ·ЁәЬДСҪвҫцЙўөгіЙҙШЎўҫЫАаІ»ОИ¶ЁөИОКМвЎЈБнТ»ЦЦКЗХл¶ФіЗКРЗшУтДЪіөБҫөДҫЫАа·Ҫ·ЁЈ¬ёщҫЭНшВз·ЗКУҫаЈЁNon Line of SightЈ¬NLOSЈ©НшВзЦРөДіөБҫ·ЦІјЗйҝцҪшРР·ЦЧйЈ¬ДЬ№»УРР§ҪвҫціөБҫ·ЦЧйЙўВТЎўІ»ҫщФИөИОКМвЎЈө«КЗГ»УРҝјВЗөҪіөУліөЦ®јдөДБҙҪУР§УҰЈ¬ЦВК№ёь¶аөДNLOS НЁРЕіөБҫҫЫјҜФЪТ»ЖрЎЈТтҙЛЈ¬ОДХВДвІЙУГDelaunay ИэҪЗ»ҜЛјПлҪ«2 ЦЦ·Ҫ·ЁҪшРРУР»ъҪбәПЈ¬МбіцТ»ЦЦРВөД»щУЪDelaunay ИэҪЗ»ҜөД¶аДҝұкУЕ»ҜЛг·ЁЎЈөЪТ»ІҪЈ¬УГDelaunay ИэҪЗ»ҜЛг·Ё¶ФТСЦӘіөБҫҪшРРҙҰАнЈ¬ХТіцУлөұЗ°іөБҫУРЦұҪУКУҫа№ШПөөДЖдЛыіөБҫЎЈёГ·Ҫ·Ёід·ЦАыУГБЛDelaunayИэҪЗРОөДҝЙА©Х№РФЈ¬Ҫ«өгP МнјУөҪDelaunay ИэҪЗРОЦРЈ¬Ц»РиИҘіэә¬УРP өгөДИ«ІҝИэҪЗРОЈ¬Ҫ«P УлИ«ІҝҝЙКУөгБ¬ҪУЖрАҙЈ¬Іў°ҙХХЛіРтҪшРРІеЦөЎЈХвСщҫНҝЙТФФЪГҝТ»ҙОІеЦөЦ®әуЈ¬Ҫ«ТСҫӯИ·¶ЁәГөДDelaunay ИэҪЗТЖіэЈ¬ІўјхЙЩ¶ФНвҪУФІЦРә¬УРёГөгөДИэҪЗРОөДјмЛчҙОКэЎЈөЪ¶юІҪЈ¬СЎИЎЦұБӘіөБҫКэДҝЧо¶аЗТҪУКХ№ҰВКЧоҙуөДіөБҫЧчОӘҙШКЧЎЈөЪИэІҪЈ¬Ҫ«УлёГҙШКЧЦұҪУПаБ¬ЗТБҪХЯВь№ю¶ЩҫаАлЈЁManhattan DistanceЈ©РЎУЪгРЦөөДіөБҫ№йОӘТ»ҙШЎЈөЪЛДІҪЈ¬ЦШёҙөЪ¶юІҪәНөЪИэІҪЈ¬ЦұЦБНкіЙЛщУРіөБҫөД·ЦҙШЈ¬КдіціөБҫ·ЦҙШҪб№ыЎЈ
3 ЙиЦГПВРРОЮПЯНЁРЕБҙВ·РЕёЙФлұИФјКшМхјюУлЧКФҙ·ЦЕд
ҪбәПёҙФУ¶ИҪПөНөДНјЧЕЙ«ОКМвЈЁGraph Coloring ProblemЈ¬GCPЈ©Ј¬И«Гж·ЦОціөБҫҫЫАаҪб№ыәНЛщРиөДөч¶ИТтЛШЎЈОӘИ·ұЈV2V БҙВ·өДҝЙҝҝРФЈ¬РиТӘЙиЦГПВРРОЮПЯНЁРЕБҙВ·РЕёЙФлұИЈЁSignal-to-Interference and Noise RatioЈ¬SINRЈ©ФјКшМхјюЈ¬ТФЕР¶ЁКЗ·сҙжФЪІ»ДЬИЭИМөДёЙЙжЎЈФјКшМхјю¶ЁТеОӘ
КҪЦРЈәҰГұнКҫПВРРОЮПЯНЁРЕБҙВ·РЕФлұИФјКшәҜКэЈ»Pg(di)ұнКҫРЕёЙФлұИЈ»Pg(di,j)ұнКҫiөгУлjөгөДұЯРЕёЙФлұИЈ»ҰТұнКҫөч¶ИТтЧУЈ»ҰГthұнКҫРЕёЙФлұИгРЦөЎЈөұФјКшМхјюІ»іЙБўКұЈ¬РиТӘҙУёЙИЕјҜәПЦРИҘіэЧоҙуөДёЙИЕБҙВ·Ј¬Іў№№ҪЁҪЪөгiәНҪЪөгjөДұЯЈ¬ЦұөҪВъЧгФјКшМхјюЎЈ
GCP өДЛјВ·КЗПИ¶ФұЯКэЧо¶аөДҪЪөгҪшРРЧЕЙ«Ј¬ФЩ¶ФұЯКэЧо¶аөДҪЪөгҪшРРЧЕЙ«Ј¬ТФҙЛАаНЖЎЈЖдДҝұкКЗИ·ұЈ2 ёцПаБЪөДҪЪөгұ»ЧЕЙПІ»Н¬өДСХЙ«Ј¬К№ПаБ¬ҪУөДҪЪөгҫЎҝЙДЬ¶јұ»ЧЕЙ«ЎЈФЪЧЕЙ«№эіМЦРЈ¬ЛжЧЕ·ЦЕдөҪіөБҫЙПөДЧКФҙЗшҝйөДФцҙуЈ¬ёчУ°ПмТтЛШ»бјхРЎЈ¬ҙУ¶шИ·ұЈ·ЦЕдёшіөБҫөДЧКФҙЗшҝй·ыәПҙ«КдТӘЗуЎЈ
4 ¶ФұИКөСй
ҪбәП5G НшВзјјКхЈ¬МбіцБЛТ»ЦЦ»щУЪјЖЛгҝШЦЖНЁРЕИЪәПөДЧКФҙ·ЦЕд·Ҫ·ЁЎЈОӘСйЦӨёГ·Ҫ·ЁКЗ·сДЬ№»ҪвҫцПЦУР·ЦЕд·Ҫ·ЁФЪКөјКУҰУГЦРҙжФЪөДОКМвЈ¬ҝӘХ№¶ФұИКөСйЎЈЙиЦГ»щУЪ¶аЦЗДЬМеРӯЧчС§П°өД·ЦЕд·Ҫ·ЁОӘ¶ФХХAЧйЈ¬»щУЪјЖЛгҝШЦЖНЁРЕИЪәПөД·ЦЕд·Ҫ·ЁОӘ¶ФХХB ЧйЈ¬ОДХВМбіцөД»щУЪ5G НшВзјјКхөД·ЦЕд·Ҫ·ЁЙиЦГОӘКөСйЧйЎЈ·ЦұрҪ«3 Чй·ЦЕд·Ҫ·ЁУҰУГУЪПаН¬өДКөСй»·ҫіЈ¬·ЦЕдіөБӘНшПВРРОпБӘНЁРЕЧКФҙЎЈФЪКөСй»·ҫіЦРЈ¬іөБҫөД·ўЙд¶ЛУлҪУКХ¶ЛҫщІЙУГөҘМмПЯЈ¬НЁ№эҝХјдІҙЛЙ№эіМЛж»ъІҝКріөБҫөДіхКјО»ЦГЈ¬КөСйІОКэјыұн1ЎЈ
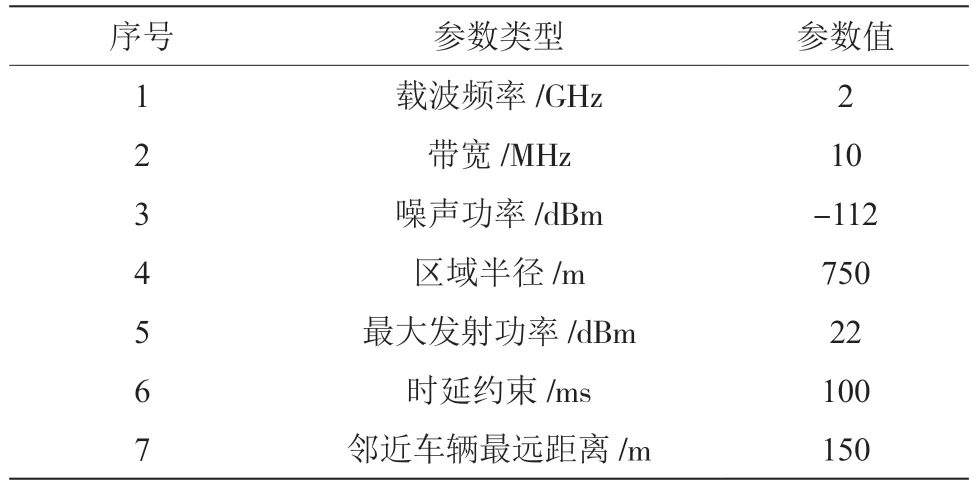
ұн1 КөСйІОКэ
ОӘСйЦӨ3 ЦЦ·ЦЕд·Ҫ·ЁөД·ЦЕдәПАнРФЈ¬Ҫ«ПВРРОЮПЯНЁРЕНМНВБҝЧчОӘәвБҝ·ЦЕдКЗ·сәПАнөДЦёұкЎЈПВРРНМНВБҝөДјЖЛ㹫КҪОӘ
КҪЦРЈәҰЦұнКҫПВРРНМНВБҝЈ»sұнКҫіөБӘНшПВРРОЮПЯНЁРЕБҙВ·іӨ¶ИЈ»tұнКҫіөБӘНшПВРРОЮПЯНЁРЕЖҪҫщПмУҰКұјдЎЈҰЦЦөФҪёЯЈ¬ЛөГчПВРРОЮПЯНЁРЕҙ«КдКэҫЭБҝФҪ¶аЈ¬НЁРЕЧКФҙАыУГВКФҪёЯЈ¬·ЦЕдФҪәПАнЈ»ҰЦЦөФҪөНЈ¬ЛөГчПВРРОЮПЯНЁРЕҙ«КдКэҫЭБҝФҪЙЩЈ¬НЁРЕЧКФҙАыУГВКФҪөНЈ¬·ЦЕдФҪІ»әПАнЎЈёщҫЭЙПКцВЯјӯЈ¬·ЦұрјЗВјФЪ10БҫЎў20 БҫЎў30 БҫЎў40 БҫТФј°50 БҫЖыіөөДЗйҝцПВЈ¬3Чй·ЦЕд·Ҫ·Ё¶ФУҰөДіөБӘНшПВРРНМНВБҝЈ¬ІвКФҪб№ыИзұн2 ЛщКҫЎЈ

ұн2 іөБӘНшПВРРНМНВБҝјЗВјұн
УЙұн2 ҝЙЦӘЈ¬КөСйЧйПВРРНМНВБҝЧоёЯЈ¬ЖдҙООӘ¶ФХХA ЧйЈ¬¶ФХХB ЧйЧоөНЎЈІЙУГКөСйЧйөД·ЦЕд·Ҫ·ЁКұЈ¬ПВРРОЮПЯНЁРЕҙ«КдКэҫЭБҝЧо¶аЈ¬НЁРЕЧКФҙөДАыУГВКЧоёЯЈ¬ІўЗТ·ЦЕдЧоәПАнЎЈТтҙЛЈ¬»щУЪ5G НшВзјјКхөД·ЦЕд·Ҫ·ЁДЬ№»КөПЦ¶ФіөБӘНшПВРРОЮПЯНЁРЕЧКФҙөДәПАн·ЦЕдЈ¬ДЬ№»МбЙэЧКФҙАыУГјЫЦөЎЈ
5 Ҫб ВЫ
ТФіөБӘНшПВРРОЮПЯНЁРЕЧКФҙ·ЦЕдОКМвОӘСРҫҝЦШөгЈ¬ҪбәП5G НшВзјјКхЈ¬МбіцБЛТ»ЦЦИ«РВөД·ЦЕд·Ҫ·ЁЎЈҝӘХ№¶ФұИКөСйЈ¬Ҫ«ёГ·Ҫ·ЁУлПЦУРөД»щУЪ¶аЦЗДЬМеРӯЧчС§П°өД·ЦЕд·Ҫ·ЁәН»щУЪјЖЛгҝШЦЖНЁРЕИЪәПөД·ЦЕд·Ҫ·ЁҪшРР¶ФұИЎЈҪб№ыұнГчОДХВЛщМб·Ҫ·ЁөДҙ«КдКэҫЭБҝёь¶аЈ¬НЁРЕЧКФҙөДАыУГВКёьёЯЈ¬·ЦЕдёьәПАнЈ¬ҝЙТФКөПЦЧоУЕөДіөБӘНшПВРРНЁРЕРФДЬФцТжЎЈ