(1.哈尔滨工程大学信息与通信工程学院,黑龙江 哈尔滨 150001;2.哈尔滨工程大学智能科学与工程学院,黑龙江 哈尔滨 150001)
0 引言
近年来,频控阵(FDA,frequency diverse array)雷达作为新体制雷达凭借其独特的性能优势得到了国内外研究人员的关注[1-2]。频控阵雷达是在相控阵雷达的基础上,通过在相邻阵元发射的信号中引入微小频偏,使方向图具有角度和距离的双重依赖性,可以形成二维空间谱对目标进行定位,且在相同带宽的条件下,可以获得比相控阵雷达更强的距离分辨力和抗干扰能力。频控阵雷达可以与多输入多输出(MIMO,multiple-input multiple-output)技术结合[3],实现角度维和距离维的解耦合,并提高自由度以定位多个目标。关于频控阵MIMO 雷达的研究已全方位展开。对于目标检测问题,文献[4]研究了一种广义似然比自适应检测方法,将对单个目标的检测问题将转化为半正定规划问题,并用谱峰搜索和牛顿迭代法求解。对于方位参数估计问题,文献[5]提出了一种对低仰角目标的角度和距离进行估计实现定位的方法;文献[6]提出了一种近似极大似然(ML,maximum likelihood)方法,用在单快拍条件下对目标进行定位。为了得到参数估计精度的理论极限,文献[7]推导了角度、距离与速度估计的理论误差,得到了克拉美罗界(CRB,Cramér-Rao bound)。对于空间中多个目标的多个参数同时估计,现有研究集中于多维参数估计及其快速实现方法,如文献[8]提出了一种基于迭代插值傅里叶系数法进行定位的方法,文献[9]提出了用降维与解耦的方法进行发射角、接收角和距离的联合估计,但这些方法局限于多维估计的框架内,当目标数较多时由于估计维度的增加而难以准确求解。
更关键的问题是,已有的基于频控阵MIMO雷达的参数估计方法均需要目标(信源)数作为先验信息,当不知道准确的目标数时,参数估计方法也会恶化甚至失效。传统的雷达信号处理方法将目标数估计与参数估计作为2 个分离的步骤,即先得到目标数的估计值,再将其代入后续的参数估计器中完成定位等任务。现有的目标数估计方法中,最具代表性且应用最广泛的方法是以Akaike 信息论准则(AIC,Akaike’s information criterion)和最小描述长度(MDL,minimum description length)准则为代表的估计准则,这类方法通过最小化假设模型和观测数据之间的Kullback-Leibler 距离确定目标数[10]。而参数估计方法则可以根据是否需要数据协方差矩阵的结构信息,分为非参数化估计方法和参数化估计方法。非参数化估计主要包括波束成形法和最小方差无畸变响应(MVDR,minimum variance distortionless response)波束成形法,可以直接利用协方差矩阵得到空间谱。其他大部分估计方法如多重信号分类(MUSIC)法和极大似然法则需要根据目标数重构信号,然后进行分解或拟合才能得到估计的结果。
在分离式的目标数与参数估计方法中,由于离散的目标数估计与连续的多维参数估计是级联关系,若目标数估计发生错误,不仅会造成漏警或虚警,而且会影响后续的参数估计性能。多年的研究已证明,目标数估计方法的发展滞后于参数估计方法,目标数估计方法的落后已经影响到高精度参数估计方法的实际应用效果。有学者尝试将目标数估计与参数估计联合处理以降低系统复杂度并更加充分地利用信号信息。文献[11]将目标数估计转化为多个子优化问题,但要求将雷达分布放置以实现空间分集;文献[12]利用噪声子空间的代数结构估计多个目标,但只适用于点源的估计。文献[13-15]研究了检测前跟踪方法,这类方法不需要设定检测门限,但仍需要用谱峰搜索等方法求解才能得到估计结果,效率低且存在量化误差,且上述方法仅适用于相控阵雷达的目标数或波达方向参数的估计。
本文在现有的频控阵MIMO 雷达研究的基础上,针对现有目标数估计方法在低信噪比情况下准确率较低、高精度定位算法计算复杂度过高的问题,对目标数和方位参数的联合估计问题进行数学建模,提出了一种频控阵MIMO 雷达的目标数和方位联合估计方法。将目标数和方向与距离参数联合估计转化为对空间谱谱峰个数的检测和对谱峰位置定位的二维多峰优化问题,降低了搜索维度并设计了基于密度的多峰差分进化算法对多峰问题快速准确求解,相比于谱峰搜索或多维优化类参数估计方法显著降低了计算量,实现了目标数与方位联合估计,即利用空域信息在估计目标数的同时得到方位参数估计结果。
1 频控阵MIMO 雷达的数学模型
假设收发共址的频控阵MIMO 雷达由M个发射阵元和N个接收阵元组成的阵列构成,阵元间距均为d,相邻的发射阵元的工作频率之间存在线性增量Δf,第m个阵元发射信号的工作频率为fm=fc+(m-1)Δf,fc为载波频率,满足 Δf≪fc。设第一个发射阵元和接收阵元为参考阵元,阵元部署示意如图1 所示。
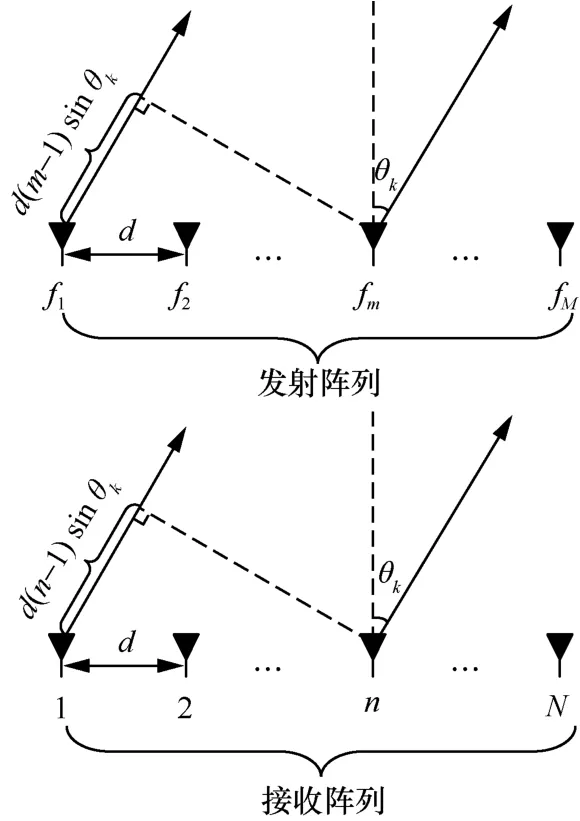
图1 阵元部署示意
在t时刻,第m个阵元发射的归一化信号幅度为x m(t),各个阵元发射的信号波形在每个脉冲持续时间Tp内相互正交,即满足
其中,υ为时延,*为共轭运算。发射信号经目标反射,产生衰落、相移并与加性噪声叠加后得到接收信号。假设空间中存在K个目标,其中第k个目标相对于阵列法线方向的角度为θk,相对于发射和接收参考阵元的距离均为rk,则第m个发射信号经过第k个目标反射后到达第n个阵元的双程传播时延为
其中,c为电磁波传播速度。则在窄带假设下,第n个阵元接收到的反射信号由各回波信号叠加得到,即
其中,ξk为第k个目标反射后回波信号的复系数,包含了目标的反射系数、路径损耗和多普勒频移。将时延和工作频率代入式(3),得到相位项的具体形式为
再将每个阵元接收到的数据通过M个匹配滤波器和混频器,其中,第l个匹配滤波器的脉冲响应与第m个发射波形对应,表示为,l= 1,2,…,M。第n个阵元经过第l个匹配滤波器的输出为
匹配滤波的推导过程如附录1 所示。由匹配滤波器与发射信号的对应关系,将第l个滤波器的输出通过混频器,即乘以,并将结果标记为,具体形式为
雷达接收机的信号处理示意如图2 所示。
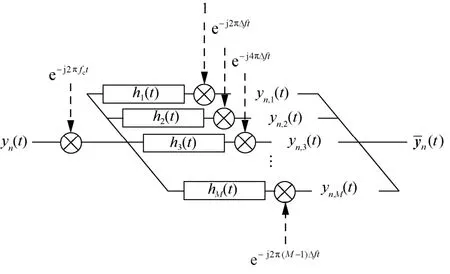
图2 雷达接收机的信号处理示意
2 联合的目标数与方位参数估计方法
2.1 联合估计方法
对于本文所研究的频控阵MIMO 雷达,当空间中目标数未知时,可以利用非参数化方法,仅用单个角度和距离组成的导向矢量γ(θ,r)重构接收信号,得到 MVDR 算法的二维空间谱函数为。当存在5 个目标时,频控阵MIMO 雷达的MVDR 空间谱示意如图3所示。采用谱峰搜索法求解时,需要对连续的解空间进行等间隔离散化采样,相邻采样点的距离被称为扫描间隔。由于非采样点上的方位也需要被采样点上的数值近似表示,故真实方位与谱峰所在采样点的距离称为量化误差。连续空间被有限个离散数值表示的过程决定了谱峰搜索的量化误差无法消除,且扫描间隔越小计算量越大。为了同时得到目标数与方位参数的准确估计值,本文设计了基于密度的多峰差分进化(DBMDE,density-based multimodal differential evolution)算法对空间谱函数这个二维多峰优化问题进行求解。理想情况下,空间谱的每个峰对应一个目标,得到的有效谱峰个数即目标数估计值,谱峰的位置经线性映射即参数估计值。由此可以实现对多个目标的联合目标数估计与方位估计,既规避了繁重的多维搜索,也不存在量化误差。
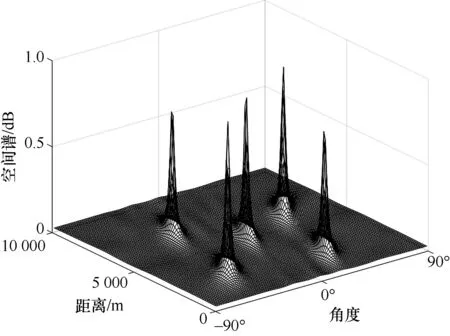
图3 当存在5 个目标时,频控阵MIMO 雷达的MVDR 空间谱示意
2.2 基于密度的多峰差分进化算法
差分进化算法是一类智能优化算法,算法中个体的分布和进化方向取决于个体间的差异。经典的差分进化算法是一种多维优化算法,只能找到单个的全局最优值,但具有优异的寻优性能,因此差分进化算法也被改进用于解决多峰优化问题。已有的各种多峰差分进化算法及变体形式均需要峰的个数作为先验信息[16],而本文设计的基于密度的多峰差分进化算法可以在峰个数未知的条件下,在迭代过程中利用密度聚类方法检测峰的个数(即根据种群中个体的密集程度检测出高密度区域),并利用改进的差分进化策略进行多峰寻优搜索确定峰的准确位置。
2.2.1 基于密度聚类确定峰的个数
设种群由P个二维个体组成,每一维分别对应目标的角度和距离,算法的最大迭代次数为G。在初代,每个个体的每一维都被初始化为[0,1] 的均匀随机数。
基于密度的聚类方法通过衡量个体之间的紧密程度来判断个体之间的可连接性,本文所提方法将基于密度的噪声点空间聚类(DBSCAN)算法[17]引入迭代寻优的过程中,利用当前种群中的个体分布的密度关系对其进行聚类,使处于同一个峰附近的个体共同演进。个体间的密度关系由2个邻域参数确定,分别是半径参数ε(形成密度直达关系所需的最大距离)和数量参数κ(形成密集区域所需的最小个体数),其中,ε随迭代次数的增加而衰减,以逐渐分辨位置相近的峰(形成新的密集区域)。由此,在算法的第g次迭代中将得到Qg个密集区域样本的集合(称为簇),并将种群中不属于任何簇的个体作为噪声点丢弃。聚类后第q个簇中含有的个体数为P g(q),第q个簇中适应度最大的个体为最优个体,q= 1,2,…,Qg。
2.2.2 利用改进的差分进化策略进行多峰寻优
本文设计了改进的多峰差分进化策略,由变异和交叉两步组成。在变异步骤中,第q个子种群中第p个变异个体的生成式为
最后,将全部子种群合并,生成下一代种群。随着迭代次数的增加,每个子种群中的个体向峰值点靠拢,Qg也将趋于稳定。当聚类得到的簇个数Qg连续代不发生变化,则判定算法已经找到全部的峰,不再执行DBSCAN 算法以节省计算量,每个子种群按照当前的聚类结果继续寻优搜索直到达到最大迭代次数。
2.2.3 异常个体筛选
由于噪声的存在和搜索边界的限制,算法定位到的峰不一定都是有效的,需要将有效峰和伪峰进行区分。计算每个子种群中的峰值即最优个体的适应度值,并按由大到小的顺序重新排列为,若相邻适应度之比小于判决门限η,即,则保留全部的峰为有效峰;否则判定存在伪峰。根据原型聚类的原理,使有效峰与伪峰对应的峰值及其均值的平方误差和最小,找到有效峰与伪峰的划分点,即有效峰的个数为
目标数与方位参数联合估计的步骤如下。
步骤1发射正交信号,并对接收信号进行匹配滤波和混频处理。
步骤2对输出信号进行采样,计算得到协方差矩阵。
步骤3利用DBMDE 算法,同时得到有效峰的个数及其位置,DBMDE 算法流程如图 4所示。
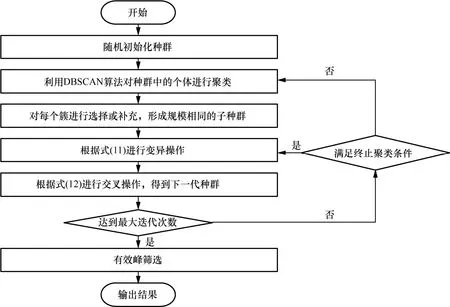
图4 DBMDE 算法流程
步骤4进行映射并输出结果,同时得到目标数与方位参数的联合估计结果。
3 实验分析
本节通过数据仿真进行实验分析,频控阵MIMO 雷达和DBMDE 算法的仿真参数如表1 和表2 所示。考虑存在3~5 个目标的情况,分别对目标数估计与方位参数估计的性能进行比较和分析。当存在 3 个目标时,中心角度分别为{- 4 0°,5°,45°},中心距离分别为{3 km,7 km,4 km} ;当存在 4 个目标时,中心角度分别为{-4 0°,-10°,20°,40°},中心距离分别为{5 km,2 km,8 km,4 km} ;当存在5 个目标时,中心角度分别为{- 4 5°,-30°,5°,30°,50°},中心距离分别为{2 .5 km,7 km,5 km,2 km,6 km} 。每次独立实验中,远场目标的方位参数为中心角度叠加(-1 0°,10° )的均匀随机数和中心距离叠加(-1000,1000)的均匀随机数。若无特殊说明,每个目标回波的系数ξk为(0,2)的均匀随机数。
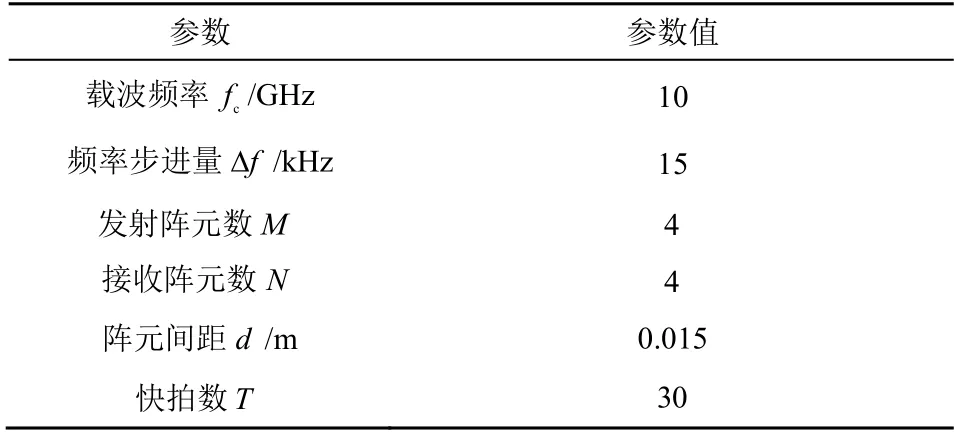
表1 频控阵MIMO 雷达的仿真参数
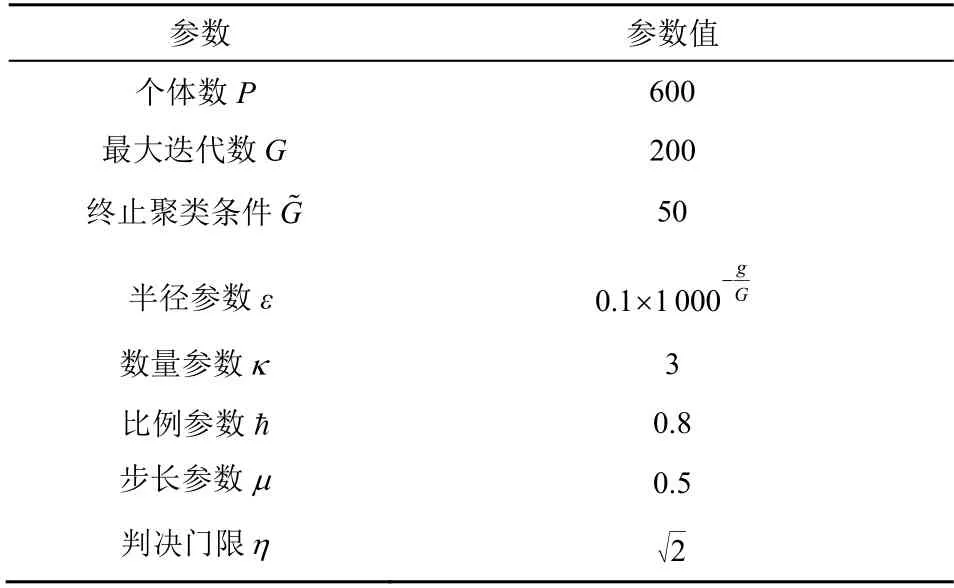
表2 DBMDE 算法的仿真参数
3.1 目标数估计性能分析
本节实验用估计目标数的成功概率分析所提DBMDE 算法的性能,对比算法包括AIC、MDL、EDC(efficient detection criteria)和SORTE(second order statistic of the eigenvalues)检测算法[18]。若估计得到的目标数与实际目标数相等,则判定为估计成功,Monte Carlo 仿真次数为1 000 次。假设4 个目标具有相同的回波系数且忽略起伏效应,得到的估计成功概率与信噪比(SNR,signal-to-noise ratio)关系如图5 所示。而实际情况中,每个目标的反射面积往往是不相等的,若每个目标回波系数取值为(0,2)的均匀随机数,其他条件不变,得到的仿真结果如图6 所示。当图5 中SNR<-8 dB 和图6 中SNR<-10 dB 时,DBMDE 算法的目标数估计性能与AIC 算法互有优劣;但在更高信噪比条件下,由于AIC 算法不是一致估计,趋于过估计目标数[10],DBMDE 算法估计成功概率则趋于1。相比于仅依据特征值大小得到目标数估计结果的传统算法,DBMDE 算法取得性能优势的原因在于对目标空域信息的利用。

图5 目标回波系数相同时目标数估计成功概率与信噪比关系
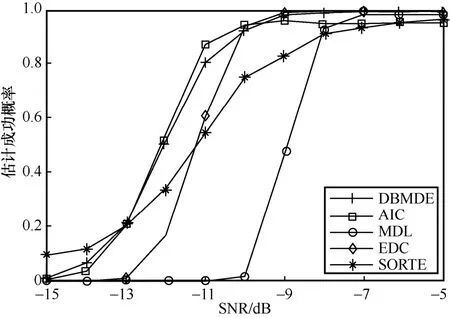
图6 目标回波系数不同时目标数估计成功概率与信噪比关系
当存在3 个目标且SNR=-10 dB 时,得到的估计成功概率与快拍数关系如图7 所示。在低信噪比和小快拍的恶劣条件下,信号子空间被污染,基于特征分解的目标数估计方法难以找到准确的结果,而DBMDE 算法具有更高的估计成功概率,说明其在复杂环境下具有通用性。值得注意的是,虽然这里只展示了所提算法的目标数估计性能,但实际上方位参数的估计也同步完成了。

图7 目标数估计成功概率与快拍数关系
3.2 方位参数估计性能分析
本节将所提DBMDE 算法与其他算法的角度和距离估计的均方根误差及成功概率进行对比。对比算法包括基于旋转不变技术(ESPRIT)[19]、MUSIC、经典波束成形(CBF,classical beam forming)和基于多维差分进化算法求解ML 的算法,CRB 被用于展示理论估计性能,推导过程如附录 2 所示,Monte Carlo 仿真次数均为100 次。
经典的多维差分进化算法被直接用来求解极大似然方程时,根据文献[20]设置参数如下:个体数为60,最大迭代次数为1 200 次,差分权重取值范围为[0.5,1],交叉概率为0.9。MUSIC 与CBF 算法的扫描间隔为1°和100 m。ESPRIT 算法中角度估计值直接由旋转不变性求解。
首先,考虑存在4 个目标的情况并假设目标数已经被正确估计,得到的角度和距离估计均方根误差和信噪比关系分别如图8 和图9 所示。随信噪比增大,DBMDE 算法渐近地趋向于CRB,而基于谱峰搜索求解MUSIC 与CBF 的算法和基于多维差分进化算法求解ML 的算法估计精度低于DBMDE 算法。
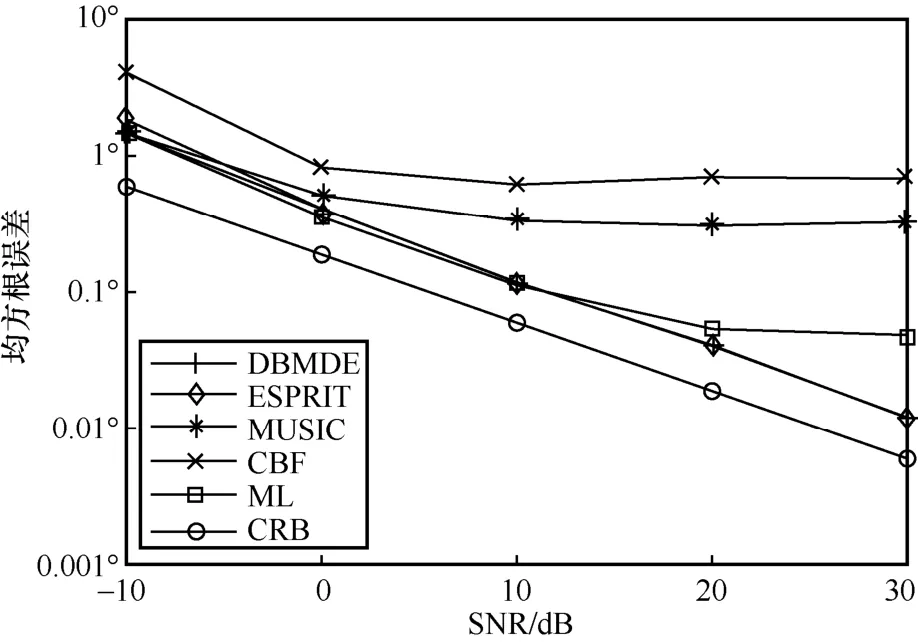
图8 角度估计的均方根误差与信噪比关系
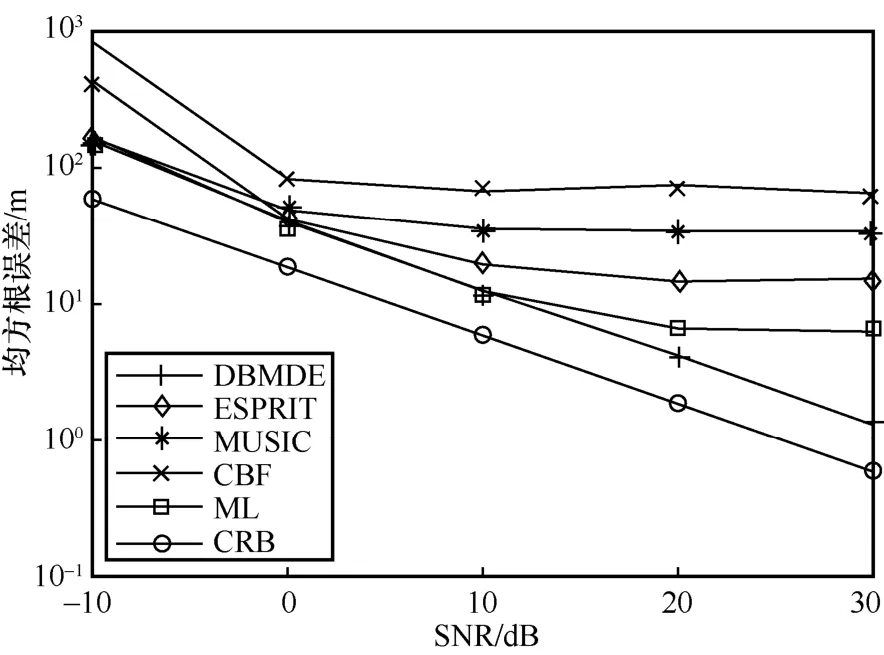
图9 距离估计的均方根误差与信噪比关系
考虑存在5 个目标的情况,规定角度估计误差小于1°且距离估计误差小于100 m 为估计成功,得到的估计成功概率与信噪比关系如图10 所示。从图10 可以看出,CBF 算法由于分辨力不足无法准确区分位置相近的目标。基于多维差分进化算法求解ML 的算法虽然不存在谱峰搜索所面临的精度与计算量的矛盾,但搜索空间的大小随目标数的增加呈指数级扩张。当存在K个目标时,每次适应度计算的复杂度为O(M3N3),搜索空间为2K维。对于5 个目标时所要求解的10 维优化问题,基于多维差分进化算法求解ML 的算法难以收敛至全局最优,估计成功概率最低。而所提DBMDE 算法通过降维处理,在空间谱上进行多峰优化求解,每次适应度计算的复杂度为O(M2N2K),且搜索空间仅为2维,在计算量上具有明显的优势。
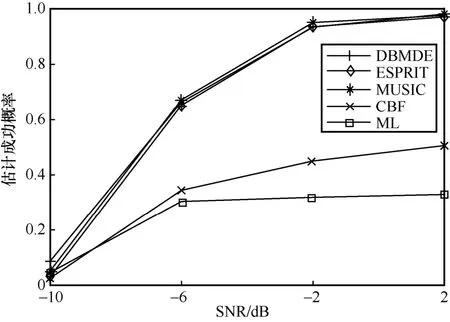
图10 估计成功概率与信噪比关系
3.3 DBMDE 算法参数分析
本节分析了DBMDE 算法中可调参数与目标数和方位参数估计性能的关系。选取对算法性能影响较大的半径参数ε和步长参数μ进行敏感性分析。ε在算法中既作为聚类半径,又在式(10)和式(11)中与μ共同用于生成新个体。由于无法对每一种参数设置方法排列组合分析,因此选取了3 种典型的取值方法,仿真存在5 个目标时目标数被正确估计的比例;角度估计精度达到0.1°、0.01°和0.001°的比例;距离估计精度达到10 m、1 m 和0.1 m 的比例。为了尽量排除噪声的影响,设置快拍数为100,信噪比为30 dB,DBMDE 算法参数敏感性分析结果如表3 所示。

表3 DBMDE 算法参数敏感性分析结果
对比表 3 数据可以看出,当半径参数ε=、步长参数μ=0.5 时,DBMDE 算法取得了最优的结果。
仿真实验的结果表明,所提DBMDE 算法具有较少的计算量和较强的稳健性,方位参数估计的均方根误差最接近克拉美罗界,实现了联合估计并克服了其他估计算法需要目标数作为先验信息的缺陷。
4 结束语
传统的阵列信号参数估计方法的思路是先进行目标数估计,然后将目标数估计结果代入参数估计器,在多维空间搜索得到全局最优解。本文利用降维处理的思想,将基于频控阵MIMO 雷达的方位参数估计问题由多维的参数优化问题转化为低维的多峰优化问题。通过设计DBMDE 算法进行求解,收敛速度更快,且估计结果更接近克拉美罗界。而且所提算法可以同时得到目标数的估计值,适用于需要对多个潜在目标进行探测和定位的场合,为阵列信号的检测与估计研究提供了新方法。所提DBMDE 算法可扩展应用到其他复杂的测向问题,如分布源的MIMO 雷达参数估计或极化敏感阵列的信源和方向联合估计,也可用于其他多峰优化问题的求解。下一步的研究重点是设计冲击噪声和杂波背景下的目标数与方位参数的高精度联合估计方法。
附录1 匹配滤波推导过程
由此得到雷达接收机中匹配滤波器的输出结果。
附录2 理论估计性能分析
定义Q=σ2I为噪声协方差矩阵,根据Slepian-Bangs公式,Fisher 信息阵F可以表示为
将Fisher 信息阵及其逆阵分别进行分块表示为
再由分块矩阵求逆公式可得F-1左上部分G11的展开形式为
由矩阵求逆公式得到角度估计和距离估计的克拉美罗界表达式为
由此得到频控阵MIMO 雷达方位参数估计的克拉美罗界。