ЈЁ1.ҪӯЛХАн№ӨС§ФәөзЖшРЕПў№ӨіМС§ФәЈ¬ҪӯЛХ іЈЦЭ 213001Ј»2.¶«ДПҙуС§ТЖ¶ҜНЁРЕ№ъјТЦШөгКөСйКТЈ¬ҪӯЛХ ДПҫ© 210096Ј©
0 ТэСФ
ОҙАҙ6G Ҫ«ОӘЦЗДЬҪ»НЁәНЧФ¶ҜјЭК»јјКхөДКөПЦМṩ»щҙЎЈ¬іЙОӘҪвҫцИЛГЗіцРРЦР¶Ф°ІИ«ЎўёЯР§ЎўКжККТФј°ЦЗДЬ»ҜРиЗуОКМвөДЦШТӘНҫҫ¶ЎЈЧчОӘЙПКцјјКхөДРЕПўҙ«Кд»щҙЎЈ¬6G ЦРөДіөБӘНшҪ«ГжБЩБ¬НЁРФЎўНЁРЕЛЩВКЎўКұСУәНҝЙҝҝРФөИ¶аЦЦРФДЬөДСПҝБТӘЗуЎЈУЙУЪіөБӘНшөДТм№№РФЎўТөОсРиЗуөДІоТмРФЎўіөБҫҪПЗҝөД¶ҜМ¬РФЈ¬ТФј°іөБӘНшНЁРЕҫаАлУРПЮөИМШХчЈ¬іөБҫЦ®јдөДЙПКцНЁРЕЦёұкДСТФөГөҪұЈХП[1-2]ЎЈ
ОӘБЛҪшТ»ІҪМбёЯПөНіРФДЬәНВъЧгОҙАҙіөБӘНшНЁРЕРиЗуЈ¬іөБӘНшНЁРЕјјКхҙУөҘТ»өДЧЁУГ¶МіМНЁРЕЈЁDSRC,dedicated short range communicationЈ©·ўХ№өҪ»щУЪ·дОСөДіөБӘНтОпЈЁC-V2X,cellular-vehicle to everythingЈ©јјКхЈ¬КөПЦБЛ·дОСНЁРЕУлЧФЧйЦҜНЁРЕөДИЪәПЎЈДҝЗ°Ј¬өдРНөДC-V2X НЁРЕБҙВ·НЁіЈ·ЦОӘіөУл»щҙЎЙиК©ЈЁV2I,vehicle to infrastructureЈ©НЁРЕәНіөУліөЈЁV2V,vehicle to vehicleЈ©НЁРЕБҪАа[3-4]ЎЈіөБӘНшЦРХвБҪАаНЁРЕөДУГ»§№ІПнЖөЖЧКЗМбёЯіөБӘНшЖөЖЧАыУГВКөДЦШТӘјјКхЦ®Т»Ј¬ө«№ІПнЖөЖЧТІ»бҙшАҙёЙИЕОКМвЈ¬·ҙ№эАҙ»бУ°ПмПөНіөДЖөЖЧР§ВК[5]ЎЈОӘБЛјхЗбёЙИЕөДУ°ПмЈ¬ОДПЧ[6]ФЪV2I ЦР¶ПФјКшПВМбіцБЛV2V НМНВБҝЧоҙу»ҜОКМвЈ¬ёшіцБЛЧоУЕөДV2V·ўЛН¶ЛГЬ¶Иј°ЖдұнҙпКҪЈ¬·ЦОцБЛV2I ЦР¶ПФјКшРиЗу¶ФV2V ЖҪҫщНМНВБҝөДУ°ПмЎЈОДПЧ[7]ҙУV2V әНV2I әПЧчНЁРЕөДҪЗ¶ИЈ¬СРҫҝБЛәгПа№ШәНЦёКэПа№ШРЕөАПВөДЧЫәПОу°ьВКЈ¬ёщҫЭФҙҪЪөгәНЦРјМҪЪөгөДЧЫәПР§УГәҜКэЈ¬РОіЙStackelberg І©ЮДОКМвЈ¬өГөҪБЛР§УГәҜКэЧоҙу»ҜПВөД·ўЙд№ҰВКЎЈОДПЧ[8]МбіцБЛТ»ЦЦЧФККУҰV2V әНV2I ¶ҜМ¬ҙ«өЭСЎФсІЯВФЈ¬АыУГ¶аМшНЁРЕАҙұЈіЦіөБҫјдБ¬НЁРФЈ¬ёшіцБЛ»щХҫёІёЗ·¶О§ДЪөДНМНВБҝәНёІёЗ·¶О§НвөДБ¬НЁКұјдәН·юОс»ЦёҙҙОКэЎЈө«ХвР©СРҫҝИФОҙДЬҪвҫцұ»¶ҜККУҰіөБӘНшОЮПЯҙ«КдРЕөАөДҫЦПЮРФЈ¬іөБӘНшНЁРЕёІёЗ·¶О§ИФКЬөҪХП°ӯОпЧиөІөДСПЦШУ°ПмЈ¬іөБӘНшНЁРЕёІёЗВКЎўБ¬НЁРФәНЖөЖЧР§ВКИФРиҪшТ»ІҪМбёЯЎЈ»щУЪЦЗДЬ·ҙЙдГжЈЁIRS,intelligent reflecting surfaceЈ©өДіөБӘНшНЁРЕПөНіҝЙТФФЪІ»ФцјУВ·ІаөҘФӘ»т»щХҫІҝКріЙұҫөДЗ°МбПВА©ҙуіөБҫөДёІёЗ·¶О§әНМбЙэНЁРЕБҙВ·Зҝ¶ИЈ¬К№іөБӘНшРФДЬН»ЖЖПЦУРЖҝҫұЈ¬КН·ЕіціөБӘНшФЪОҙАҙјӨФцУҰУГЙПөДЗұБҰ[9-10]ЎЈ
IRS НЁіЈУЙҙуБҝөзҙЕөҘФӘЕЕБРЧйіЙЈ¬НЁ№эҝЙұаіМөД·ҪКҪ¶ҜМ¬өчҝШөзҙЕөҘФӘөДРФЦКАҙ¶ФөзҙЕІЁҪшРРЦЗДЬөчҝШЈ¬Ҫш¶шФцЗҝРЕөАёҙУГФцТжәНҪУКХРЕәЕЗҝ¶И[11-12]ЎЈ»щУЪIRS өДРВРНОЮПЯНЁРЕҙ«КдјјКхЧчОӘ6GПөНіОпАнІг№ШјьјјКхЦ®Т»Ј¬ҪьДкАҙТСҫӯұ»№г·әЦӨКөЈ¬ФЪОЮПЯНЁРЕНшВзЦРІҝКрIRS ҝЙТФёДұдҙ«НіОЮПЯРЕөАөДІ»ҝЙҝШМШРФЈ¬КөПЦОҙАҙОЮПЯНшВзөДёІёЗФцЗҝәНИЭБҝМбЙэ[13-15]ЎЈIRS НЁіЈІҝКрФЪ¶аМмПЯНЁРЕПөНіЦРЈ¬НЁ№эБӘәПУЕ»Ҝ·ўЛНІЁКшУлIRS ЙПөД·ҙЙдІЁКшҝЙТФУРР§МбёЯПөНіИЭБҝ»тМбЙэЖөЖЧР§ВКЎўјхЙЩ·ўЙдЧЬ№ҰВК[16-19]ЎЈУЙУЪIRS ҙшАҙөД¶аҫ¶ТФј°Цч¶ҜөчХыІЁКшҙшАҙөДРЕәЕФцЗҝУЕКЖЈ¬IRS ТІұ»ЦӨГчҝЙТФУРР§ёЁЦъРҜДЬҙ«КдәНОпАнІг°ІИ«ЙијЖ[20-21]ЎЈҙЛНвЈ¬ФЪТ»Р©МШКвөДНшВзіЎҫ°ЦРЈ¬ИзОпБӘНшЎўИПЦӘОЮПЯНшВзЎўОЮИЛ»ъНЁРЕПөНіөИЈ¬НЁ№эІҝКрIRS АҙёЁЦъОЮПЯНЁРЕЈ¬ЖдПөНіДЬР§ЎўЖөЖЧР§ВКЎўНшВзёІёЗДЬБҰөИТІҝЙТФөГөҪГчПФёДЙЖ[22-26]ЎЈ»щУЪҙЛЈ¬IRS ТІұ»УГУЪСРҫҝМбЙэіөБӘНшБ¬НЁРФЎўПөНіИЭБҝөИОКМвЎЈОДПЧ[27-28]·ЦОцБЛIRS ёЁЦъПВіөБҫјдНЁРЕөДЦР¶ПёЕВКЎўНЁРЕ·¶О§ЎўҪУКХ¶ЛОуұИМШВКәНПөНіНМНВБҝөИРФДЬЦёұкЈ¬Ҫб№ыұнГчIRSФЪіөБӘНшРФДЬЙПҝЙҙшАҙГчПФФцТжЎЈОДПЧ[29-30]СРҫҝБЛіөБӘНшЦРIRS ёЁЦъПВөДБҙВ·ұйАъИЭБҝәНЖҪҫщОу·ыәЕёЕВКЈ¬МбіцБЛ¶аёцIRS өДЧоУЕСЎФсІЯВФЎЈОӘБЛМбёЯЖөЖЧР§ВКЈ¬IRS ёЁЦъПВV2I әНV2V №ІҙжНшВзөДРФДЬСРҫҝТІК®·ЦЦШТӘЎЈОДПЧ[31]¶ФV2I әНV2V №ІҙжПВөД°ІИ«ЦР¶ПёЕВКҪшРРБЛ·ЦОцЈ¬ёшіцБЛIRS ёЁЦъПВөД°ІИ«ЦР¶ПёЕВКұнҙпКҪЎЈіэБЛБ¬НЁРФөИРФДЬЙПөДАнВЫ·ЦОцНвЈ¬ОДПЧ[32]СРҫҝБЛV2I әНV2V БҙВ·№ІҙжКұөДЧКФҙ·ЦЕдОКМвЈ¬ФЪИ·ұЈV2V БҙВ·РЕәЕУлёЙИЕјУФлЙщұИЈЁSINR,signal to interference plus noise ratioЈ©өДФјКшПВЈ¬ТФЧоҙу»ҜV2I УГ»§ИЭБҝОӘДҝұкЈ¬ЙијЖБЛЧоУЕөД№ҰВКЎўЖөЖЧЧКФҙ·ЦЕдәНIRS ·ҙЙдПөКэЎЈө«ЙПКцСРҫҝ¶јГ»УРҝјВЗ¶аКдИл¶аКдіцЈЁMIMO,multiple input multiple outputЈ©іөБӘНшПөНіЎЈОДПЧ[33]ТФЧоҙу»ҜЧоРЎҪУКХРЕФлұИОӘДҝұкЈ¬СРҫҝБЛMIMO іөБӘНшіЎҫ°ПВIRS ёЁЦъ¶аіөБҫУлВ·ІаөҘФӘНЁРЕКұөДБӘәПІЁКшіЙРО·Ҫ·ЁЎЈОДПЧ[34]СРҫҝБЛIRS ёЁЦъПВ·ўЛН¶ЛәНIRS·ҙЙд¶ЛөДБӘәПІЁКшУЕ»Ҝ·Ҫ·ЁЈ¬ёГ·Ҫ·ЁХл¶ФәБГЧІЁЖө¶ОПВөДіөБӘНшіЎҫ°ЎЈОДПЧ[35]ФтФЪәБГЧІЁіөБӘНшЦРҪшТ»ІҪёшіцБЛРЕөА№АјЖІ»НкИ«ЗйҝцПВЈ¬·ўЛН¶ЛәНIRS ¶ЛөДОИҪЎРФІЁКшіЙРОЙијЖ·Ҫ·ЁЎЈө«ХвР©СРҫҝОҙҝјВЗV2I әНV2V БҪАаБҙВ·№ІҙжөДіЎҫ°ЎЈЧЫЙПЛщКцЈ¬СРҫҝ»щУЪIRS ёЁЦъіөБӘНшНЁРЕПөНіөДБӘәПІЁКшіЙРООКМвҫЯУРЦШТӘПЦКөТвТеЈ¬ө«ДҝЗ°ИФИұЙЩV2I әНV2V№ІҙжПВөДMIMO ПөНіРФДЬөДСРҫҝЎЈ
Хл¶ФТФЙПЛщКцMIMO іөБӘНшОКМвЈ¬ұҫОДҫЯМеСРҫҝ№ӨЧчИзПВЎЈ
1) ҪЁБўБЛV2I әНV2V №ІҙжПВ»щУЪIRS ёЁЦъөДMIMO іөБӘНшЦХ¶ЛНЁРЕБҙВ·ДЈРНЎЈФЪН¬КұВъЧгV2V УГ»§КэҫЭЛЩВКРиЗуЎўV2I »щХҫ·ўЙд№ҰВККЬПЮәНIRS ·ҙЙдПаТЖДЈФјКшМхјюПВЈ¬НЁ№эБӘәПУЕ»ҜV2I»щХҫ·ўЛНФӨұаВлҫШХуЎўIRS ·ҙЙдПаТЖҫШХуЈ¬ёшіцБЛMIMO іөБӘНшV2I УГ»§РЕөАИЭБҝЧоҙу»ҜОКМвЎЈёГОКМвКЗТ»ёц¶аұдБҝсоәПөД·ЗН№УЕ»ҜОКМвЈ¬ДСТФЦұҪУЗуҪвЎЈ
2) Хл¶ФЙПКц·ЗН№УЕ»ҜОКМвЈ¬МбіцБЛТ»ЦЦҪ»МжөьҙъУЕ»ҜЛг·ЁЎЈКЧПИЈ¬ІЙУГЧоРЎҫщ·ҪОуІоЈЁMMSE,minimum mean square errorЈ©№жФт°С·ЗН№ДҝұкәҜКэЧӘ»»ОӘөИјЫөДТЧҙҰАнәҜКэЈ»ЖдҙОЈ¬Хл¶Ф·ўЛНФӨұаВлҫШХуөДУЕ»ҜОКМвЈ¬АыУГҫШХу·ЦОцАнВЫ°СТюКҪөДІ»өИКҪФјКшМхјюЧӘ»»ОӘПФКҪөДН№ФјКшМхјюЈ¬ФЩ°СҫШХујЈФЛЛгҪшРРПтБҝ»ҜұнКҫЈ¬өГөҪҝЙТФЦұҪУУГУЕ»Ҝ№ӨҫЯCVXЗуҪвөДРОКҪЈ»ФЩҙОЈ¬Хл¶ФIRS ·ҙЙдПаТЖҫШХуөДУЕ»ҜОКМвЈ¬АыУГДЪұЖЛг·ЁЎўіН·ЈТтЧУЈ¬Ҫ«·ЗН№ФјКшЧӘ»»ОӘ»ҘІ№ЛЙіЪОКМвЗуҪвЈ¬ұЬГвБЛК№УГҪПёЯёҙФУ¶ИөД°л¶Ё№ж»®әНёЯЛ№Лж»ъ»ҜЗуҪв·Ҫ·ЁЈ»ЧоәуЈ¬МбіцБЛЗуҪв·ўЛНФӨұаВләНIRS ·ҙЙдПаТЖҫШХуөДҪ»МжөьҙъУЕ»ҜЛг·ЁЎЈ
3) ¶ФV2I әНV2V УГ»§№ІҙжПВөД»щУЪIRS ёЁЦъөДMIMO іөБӘНшНЁРЕРФДЬҪшРРБЛ·ВХжЎЈ·ВХжҪб№ыСйЦӨБЛЛщМбЛг·ЁөДКХБІРФәНУЕФҪРФЈ¬ЦӨГчБЛ»щУЪIRSёЁЦъөДMIMOіөБӘНшV2IУГ»§ФЪёГЛг·ЁПВРЕөАИЭБҝөДПФЦшМбЙэЈ¬ёшіцБЛIRS ЧојСІҝКрО»ЦГәНЖҪҫщіөЛЩ¶ФV2I УГ»§РЕөАИЭБҝөДУ°ПмЎЈ
1 ПөНіДЈРН
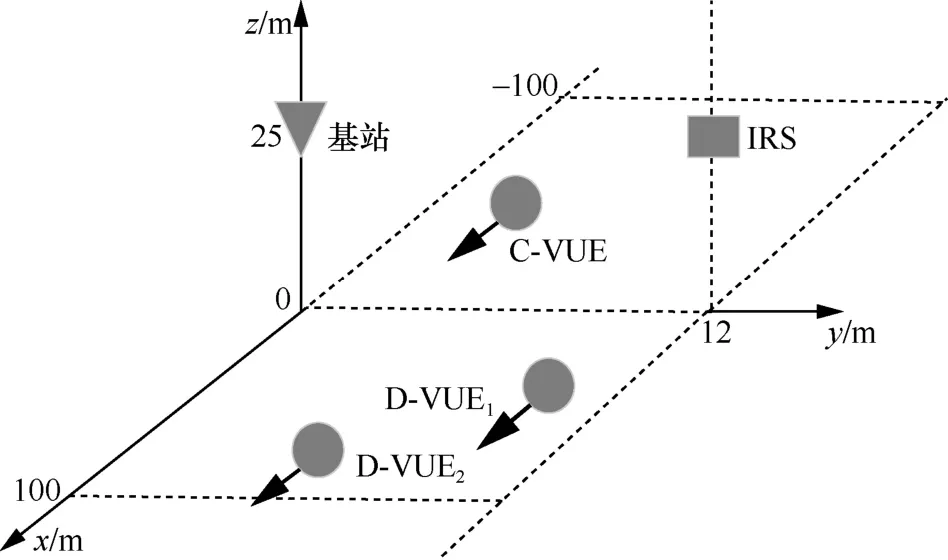
өдРНөДіөБӘНшіЎҫ°°ьә¬V2I әНV2V БҪАаУГ»§ЎЈV2I ЦчТӘ·юОсКэҫЭҙ«КдЛЩ¶ИҪПёЯөДНЁРЕРиЗуЈ¬ҙЛАаіөБҫНЁРЕЦХ¶Лұ»іЖОӘ»щУЪ·дОСөДіөБҫУГ»§ЙиұёЈЁC-VUE,cell-vehicle user equipmentЈ©Ј»V2V ЦчТӘКЗіөБҫЦХ¶ЛЦұҪУНЁРЕЈ¬ЦчТӘ·юОсөНКұСУРФ°ІИ«АаРЕПўЈ¬ҙЛАаіөБҫНЁРЕЦХ¶Лұ»іЖОӘD2D іөБҫУГ»§ЙиұёЈЁD-VUE,D2D vehicle user equipmentЈ©[31-32]ЎЈҝјВЗIRS ёЁЦъөДПВРРБҙВ·MIMO іөБӘНшіЎҫ°ИзНј1 ЛщКҫЈ¬IRS ІҝКрФЪВ·ұЯёЁЦъіөБӘНшНЁРЕЈ¬јЩЙиЦ»ҝјВЗіөБӘНш·дОС»щХҫЈЁ»тВ·ІаөҘФӘЙиК©Ј©НЁРЕёІёЗ·¶О§ДЪөДОЮПЯҙ«КдОКМвЈ¬ёІёЗ·¶О§ДЪ°ьә¬Т»ёцC-VUEәНТ»¶ФD-VUEЈЁD-VUE1ОӘ·ўЛН¶ЛЈ¬D-VUE2ОӘҪУКХ¶ЛЈ©ЎЈКХ·ўБҪ¶Л¶јКЗ¶аМмПЯЈ¬»щХҫәНC-VUE МмПЯКэ·ЦұрОӘMtәНMrЈ¬D-VUE өД·ўЛН¶ЛәНҪУКХ¶ЛМмПЯКэ·ЦұрОӘLtәНLrЈ¬IRS ЙПөД·ҙЙдөҘФӘКэОӘNЎЈ
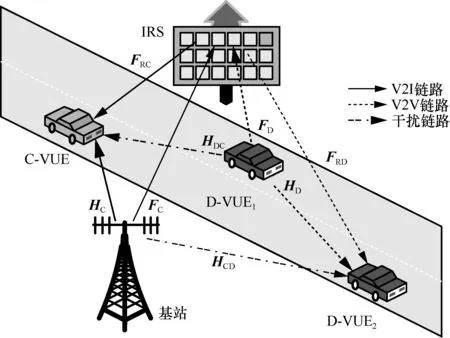
Нј1 IRS ёЁЦъөДПВРРБҙВ·MIMO іөБӘНшіЎҫ°
1.1 РЕөАГиКц
ёГПөНіЦРЈ¬ЧчОӘV2I УГ»§Ј¬»щХҫ·ўЛНРЕәЕёшC-VUEЈ»ЧчОӘV2V УГ»§Ј¬D-VUE1іөБҫ·ўЛНРЕәЕёшD-VUE2ЎЈУЙУЪIRS өДёЁЦъәНІЁКшҝШЦЖЈ¬»щХҫәНD-VUE1өДПВРРРЕәЕ»бҫӯ№эIRS ·Цұр·ҙЙдёшC-VUEәНD-VUE2ЎЈТтҙЛЈ¬C-VUE әНD-VUE2өДДҝұкҪУКХРЕәЕҫщКЗЦұҙпҫ¶әНҫӯ№эIRS өД·ҙЙдҫ¶ЙПөДБҪВ·РЕәЕөДөюјУЎЈУЙУЪV2I УГ»§әНV2V УГ»§№ІУГЖөЖЧЈ¬C-VUE »бКЬөҪАҙЧФD-VUE1өДёЙИЕЈ¬Н¬СщЈ¬D-VUE2»бКЬөҪАҙЧФ·дОС»щХҫөДёЙИЕЎЈИзНј1 ЛщКҫЈ¬»щХҫУлIRSЎўD-VUE1УлIRSЎўIRS УлC-VUEЎўIRS УлD-VUE2Ц®јдөДРЕөА·ЦұрјЗОӘЈ»»щХҫУлC-VUEЎўD-VUE1УлD-VUE2Ўў»щХҫУлD-VUE2ЎўD-VUE1УлC-VUEЦ®јдөДРЕөА·ЦұрјЗОӘЎЈ
IRS НЁ№эөчХы·ҙЙдөҘФӘПаО»ЈЁ·щ¶ИОӘ1Ј©АҙЧоҙу»ҜУГ»§ИлЙдРЕәЕЈ¬IRS өД·ҙЙдПаТЖҫШХуұнКҫОӘұнКҫөЪnёц·ҙЙдөҘФӘЈ¬ЖдПаТЖОӘҰИnЎК [0,2ҰР]Ј¬n= 1,2,Ўӯ,NЎЈУЙУЪIRSҫЯУРІЁКш¶ЁПтҝЙҝШДЬБҰЈ¬ҝЙјЩЙи»щХҫУлIRSЎўIRSУліөБҫЦХ¶ЛЦ®јдөДНЁРЕРЕөАОӘАіЛ№РЕөАЈ¬ЖдУаРЕөАОӘИрАыРЕөА[33]ЎЈАіЛ№РЕөАҝЙұнКҫОӘ
ЖдЦРЈ¬dОӘХуБРФӘЛШјдҫаАлЈ¬ҰЛОӘөзҙЕІЁІЁіӨЈ¬ҰХОӘөҘёцХуБРФӘЛШ/МмПЯ¶ФУҰөДІЁКшөҪҙпҪЗЈЁAoA,angle of arrivalЈ©»тАлИҘҪЗЈЁAoD,angle of departureЈ©ЎЈ»щУЪҙЛЈ¬КУПЯПЯВ·ҝЙұнКҫОӘ
1.2 ИЭБҝ·ЦОц
2 ІЁКшіЙРОЙијЖ
ұҫОДТӘФЪВъЧгV2V УГ»§КэҫЭЛЩВКРиЗуЎўV2I»щХҫ·ўЙд№ҰВККЬПЮТФј°IRS ·ҙЙдПаТЖДЈФјКшМхјюПВЈ¬ТФЧоҙу»ҜV2I УГ»§РЕөАИЭБҝОӘДҝұкЈ¬БӘәПУЕ»ҜC-VUE ·ўЛН¶ЛөД·ўЛНФӨұаВлҫШХуWәНIRS өД·ҙЙдПаТЖҫШХуҰөЈ¬өГөҪ»щХҫәНIRS ¶ЛЦчұ»¶ҜБӘәПІЁКшіЙРОЙијЖ·Ҫ·ЁЎЈұҫҪЪҪ«ёшіцУЕ»ҜОКМвДЈРНЎўЧУН№ОКМвЗуҪв·Ҫ·ЁТФј°өГөҪФӯОКМвҪвөДҪ»МжөьҙъУЕ»ҜЛг·ЁЎЈ
2.1 ОКМвҪЁДЈУлөИјЫЧӘ»»
V2I УГ»§КэҫЭЛЩВКЧоҙу»ҜОКМвҝЙТФұнКцОӘ
ЖдЦРЈ¬КҪ(11a)ОӘУЕ»ҜДҝұкЈ»КҪ(11b)ОӘV2V УГ»§КэҫЭЛЩВКФјКшЈ¬ҰГreqОӘЧоРЎКэҫЭЛЩВКРиЗуЈ»КҪ(11c)ОӘ»щХҫ·ўЙд№ҰВКФјКшЈ¬PОӘ»щХҫҝЙУГөД·ўЙдЧЬ№ҰВКЈ»КҪ(11d)ОӘIRS ·ҙЙдПаТЖДЈ1 ФјКшЎЈ
P2 өДУЕ»ҜұдБҝКЗПа»ҘсоәПөДЈ¬ҝЙІЙУГҪ»МжөьҙъУЕ»ҜЛг·Ё[16-20]Ј¬ёщҫЭMMSE №жФтЈ¬Ц»ТӘУЕ»ҜұдБҝWәНҰөөДГҝҙОөьҙъЦөёшіцЈ¬јҙҝЙҪвсоUCЎўUDЎўVCәНVDЎЈЛщТФЦ»РиҪ»МжУЕ»ҜWәНҰөЎЈПВГжёшіцҫЯМеөДҪ»МжУЕ»ҜWәНҰөөД·Ҫ·ЁЎЈ
2.2 УЕ»ҜW
№М¶ЁҰөЎўUCЎўUDЎўVCәНVDЈ¬ФтЗуҪвWөДУЕ»ҜОКМвҝЙЧӘ»»ОӘ
°СECҙъИлКҪ(20a)Ј¬НЁ№эҫШХујЈөДөИјЫІЩЧчЦ»ұЈБфә¬УРУЕ»ҜұдБҝWөДПоЈ¬ФтP3 өДДҝұкәҜКэҝЙөИјЫОӘ
°СEDҙъИлКҪ(20b)Ј¬Іў°СІ»ә¬УРУЕ»ҜұдБҝWөДПоТЖөҪІ»өИКҪУТұЯЈ¬ФтФјКшМхјюКҪ(20b)ҝЙөИјЫОӘ
°СКҪ(20a)әНКҪ(20b)·ЦұрУГКҪ(21)әНКҪ(22)ҙъМжЈ¬ФтP3 ҝЙөИјЫОӘ
P4 ОӘН№УЕ»ҜОКМвЈ¬ө«УЙУЪҫШХујЈФЛЛгөДҙжФЪЈ¬ІўІ»ДЬЦұҪУУГCVX АҙЗуҪвЎЈОӘБЛ·ҪұгК№УГCVXЈ¬ҫШХуөДјЈФЛЛгҝЙТФАыУГКҪ(24)әНКҪ(25)ЧӘ»»ОӘПтБҝЦ®јдөДФЛЛгЎЈ
ДҝұкәҜКэf(W)ЦРөДөЪ¶юПоЎўөЪИэПоҝЙТФЦұҪУАыУГәгөИКҪ(24)ҪшРРЧӘ»»Ј¬өЪТ»ПоҝЙТФПИК№УГКҪ(24)Ј¬ФЩАыУГКҪ(25)ҪшРРЧӘ»»Ј¬ҝЙөГ
Н¬АнҝЙөГөҪФјКшМхјюКҪ(23b)ЧуұЯҫШХујЈФЛЛгөДПтБҝ»ҜЧӘ»»ЎЈБоПтБҝЈ¬ФтP4ҝЙТФөИјЫЧӘ»»ОӘ
P5 ҝЙТФЦұҪУК№УГCVX ЗуҪвЈ¬Чоәу°СЗуҪвіцөДwЦШЧйОӘҫШХуWјҙөГөҪP3 өДҪвЎЈ
2.3 УЕ»ҜҰө
№М¶ЁWЎўUCЎўUDЎўVCәНVDЈ¬ФтЗуҪвҰөөДУЕ»ҜОКМвҝЙЧӘ»»ОӘ
УЕ»ҜұдБҝҰөТюә¬ФЪДҝұкәҜКэәНФјКшМхјюұнҙпКҪөДРЕөАҫШХуЦРЎЈ
ФЩ№ЫІмФјКшМхјюКҪ(28b)Ј¬ЖдІ»өИәЕЧуұЯөДРОКҪУлДҝұкәҜКэПаЛЖЈ¬°СEDҙъИлКҪ(28b)Ј¬ҝЙАыУГҙҰАнДҝұкәҜКэөД·Ҫ·Ё¶ФКҪ(28b)ҪшРРЧӘ»»Ј¬ХвАпІ»ФЩЧёКцЈ¬ЧоЦХҝЙ°С Tr(VDED)ЧӘ»»ОӘ
УГКҪ(34)ЎўКҪ(35)·ЦұрМж»»КҪ(28a)ЎўКҪ(28b)Ј¬ИҘөфДҝұкәҜКэЦРөДіЈКэПоЈ¬ФтP6 ҝЙөИјЫЧӘ»»ОӘ
УЙУЪҫШХуBЎўCЎўәН¶јКЗ·Зёә°л¶ЁҫШХуЈ¬ҰёәНТІКЗ·Зёә°л¶ЁҫШХуЎЈP8 ·ЗН№Ц»КЗТтОӘФјКшМхјюКҪ(37c)өД·ЗН№РФЎЈёГОКМвҝЙЧӘ»»ОӘ°л¶Ё№ж»®Ј¬ФЩУГёЯЛ№Лж»ъ»ҜЗуҪвЈ¬ө«ёГ·Ҫ·ЁёҙФУ¶ИёЯЎЈ
ұҫОДК№УГДЪұЖЛг·ЁҪшРРЗуҪвЈ¬ҪөөНјЖЛгёҙФУ¶ИЎЈДЪұЖЛг·ЁөДФӯАнКЗФЪГҝҙОөьҙъЦРХТөҪЛщЗуәҜКэөДЙПҪзАҙЦрІҪұЖҪьЧоУЕЦөЎЈТФәҜКэf(x)ОӘАэЈ¬¶ЁТеЖдФЪөЪt+1ҙОөьҙъКұөДЙПҪзОӘЈ¬ёГЙПҪзөДИ·¶ЁРиТӘВъЧгИзПВ3 ёцМхјю[20,26,38]ЎЈ
ТтҙЛЈ¬өұҰМЈҫ 0КұЈ¬ҝЙУГ¶ю·Ц·ЁХТөҪЧоУЕөДҰМ*ЎЈ°СҰМ*ҙъИлКҪ(42)јҙөГP9 өДЧоУЕҪвϕ*Ј¬Ҫш¶шөГөҪP6өДЧоУЕҪвҰө*ЎЈ
2.4 Ҫ»МжөьҙъУЕ»ҜЛг·Ё

Лг·Ё1Ҫ»МжөьҙъУЕ»ҜЛг·Ё

ЗуҪв
3 ·ВХжҪб№ыУл·ЦОц
ұҫҪЪНЁ№э·ВХж·ЦОцЖА№АЛщМб·Ҫ°ёөДРФДЬЎЈ·ВХжіЎҫ°ИзНј2 ЛщКҫЈ¬іөБҫН¬ПтРРК»Ј¬·ЦІјФЪТ»¶ОіӨ200 mЎўҝн12 m өДИэіөөАөАВ·ЗшјдДЪЈ¬ЖҪҫщіөЛЩv=70 km/hЈ¬C-VUE іөБҫәНТ»¶ФD-VUE іөБҫ°ҙҫщЦөОӘ2.5vөДЦёКэ·ЦІјЛж»ъЙъіЙЈ¬іөФШЦХ¶ЛМмПЯёЯ¶И1.5 mЎЈ»щХҫәНIRS ІҝКрФЪөАВ·БҪІаЈ¬ёЯ¶ИҫщОӘ25 mЈ¬ТФөАВ·Т»ІаөДЦРјдөгОӘЧшұкФӯөгЈ¬»щХҫәНIRS өДЧшұк·ЦұрОӘ(0,0,25)әН(0,12,25)[32]ЎЈЖдЛы·ВХжІОКэЙиЦГИзОЮМШКвЛөГчИзұн1 ЛщКҫЎЈ
Нј2 ·ВХжіЎҫ°
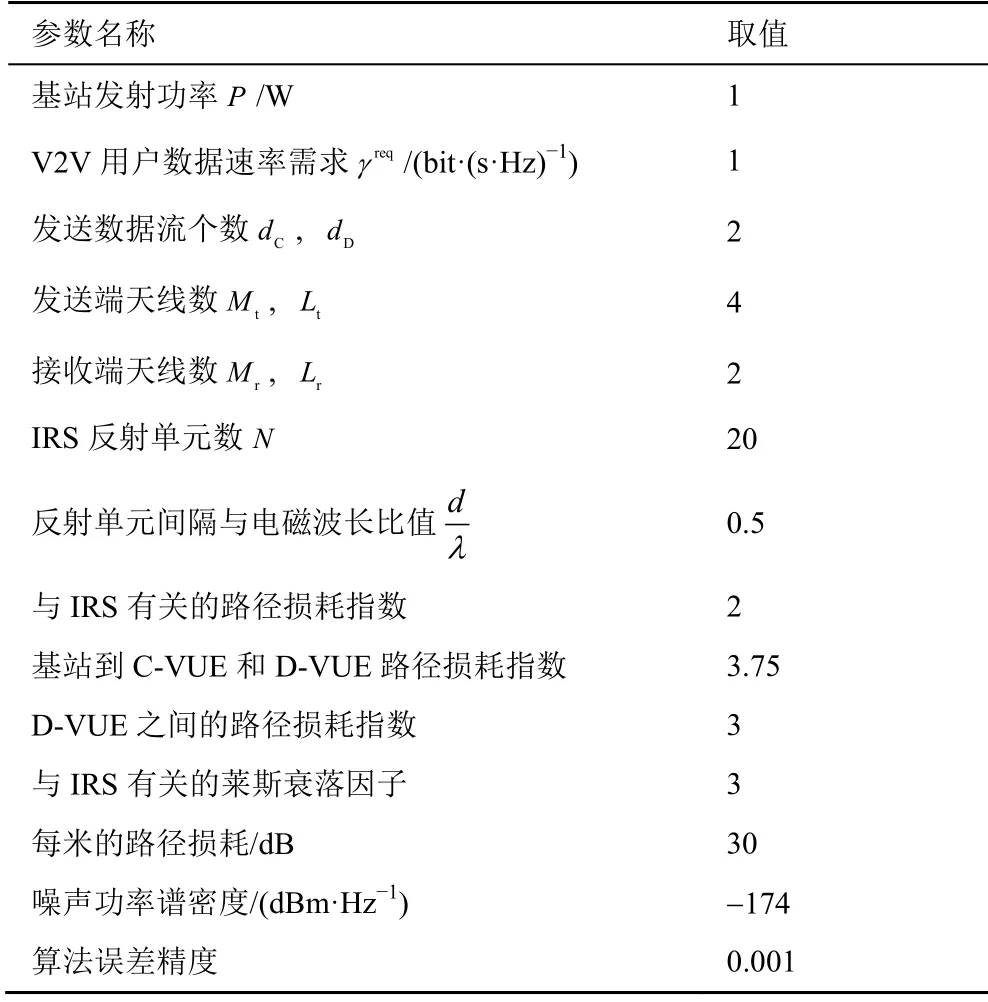
ұн1 ·ВХжІОКэЙиЦГ
V2I УГ»§өДРЕөАИЭБҝЛжҪ»МжөьҙъУЕ»ҜЛг·ЁөьҙъҙОКэөДұд»ҜИзНј3 ЛщКҫЎЈIRS ·ҙЙдПаТЖДЈёцКэФҪЙЩЛг·ЁКХБІЛЩ¶ИФҪҝмЈ¬өұN=20 КұЈ¬Лг·Ёөьҙъ10 ҙОҫНДЬКХБІөҪОИ¶ЁЦөЎЈКөјК№ӨіМЦРИз№ы¶ФКХБІЛЩ¶ИТӘЗуҪПёЯЈ¬ҝЙТФККөұОюЙьҫ«¶ИАҙК№УГҪПЙЩөДөьҙъҙОКэЈ¬АэИзЈ¬УліхКјЦөПаұИЈ¬өьҙъ10 ҙОКұN=20Ўў60әН100 ¶ФУҰөДРЕөАИЭБҝ·ЦұрМбёЯБЛ4.2 dBЎў3.0 dBәН2.4 dBЈ¬РФДЬМбЙэұИҪПГчПФЎЈ
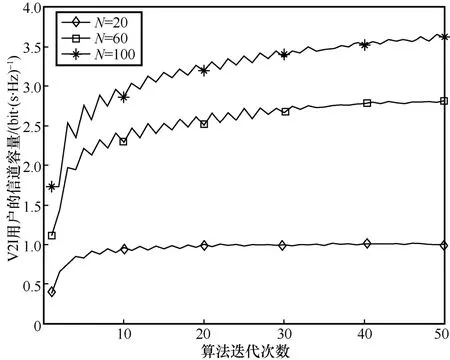
Нј3 РЕөАИЭБҝЛжҪ»МжөьҙъУЕ»ҜЛг·ЁөьҙъҙОКэөДұд»Ҝ
ұҫОД¶ФЛщМбЛг·ЁУл3ЦЦ»щЧјЛг·ЁФЪІ»Н¬IRS·ҙЙдөҘФӘКэПВҪшРРБЛұИҪПЈ¬ЦӨГчБЛЛщМбЛг·ЁөДУЕФҪРФЎЈІ»Н¬Лг·ЁөДРЕөАИЭБҝУлIRS ·ҙЙдөҘФӘКэөД№ШПөИзНј4ЛщКҫЎЈ3 ЦЦ»щЧјЛг·ЁИзПВЈә1) РЕөАЖҘЕдЛг·ЁЈ¬јҙ»щХҫөД·ўЛНФӨұаВлҫШХуІЙУГАнПлРОКҪЈ¬АыУГРЕөАФцТжҫШХуөДЖжТмЦө·ЦҪвЙијЖЈ¬IRS ПаТЖҫШХуІЙУГұҫОД·Ҫ·ЁЙијЖЈ»2) ОЮIRS ёЁЦъЛг·ЁЈ¬јҙПөНіЦРІ»ІҝКрIRSЈ»3) IRSПаТЖЛж»ъЛг·ЁЈ¬јҙ·ўЛНФӨұаВлөДЗуҪвАыУГұҫОДЛг·ЁЈ¬ө«IRS өДПаТЖҫШХуКЗЛж»ъЙъіЙөДЎЈҙУНј4 ҝЙТФҝҙіцЈ¬ЛжЧЕIRS ·ҙЙдөҘФӘКэөДФцјУЈ¬ЛщМбЛг·ЁV2I УГ»§өДРЕөАИЭБҝЦрҪҘМбЙэЈ¬ЗТУлЖдЛы3 ЦЦЛг·ЁПаұИРФДЬФцТжёьјУГчПФЎЈОЮIRS ёЁЦъЛг·ЁәНIRS ПаТЖЛж»ъЛг·ЁөДРЕөАИЭБҝјёәхПаН¬Ј¬ЛөГчБЛІҝКрIRS ИфІ»ҪшРРІЁКшУЕ»ҜФтОЮ·ЁҙшАҙРФДЬФцТжЎЈөұIRS ·ҙЙдөҘФӘКэОӘ20 КұЈ¬ЛщМбЛг·ЁУлЖдЛыЛг·ЁПаұИРЕөАИЭБҝФцТжҝЙҙп3.5 dBЎЈ
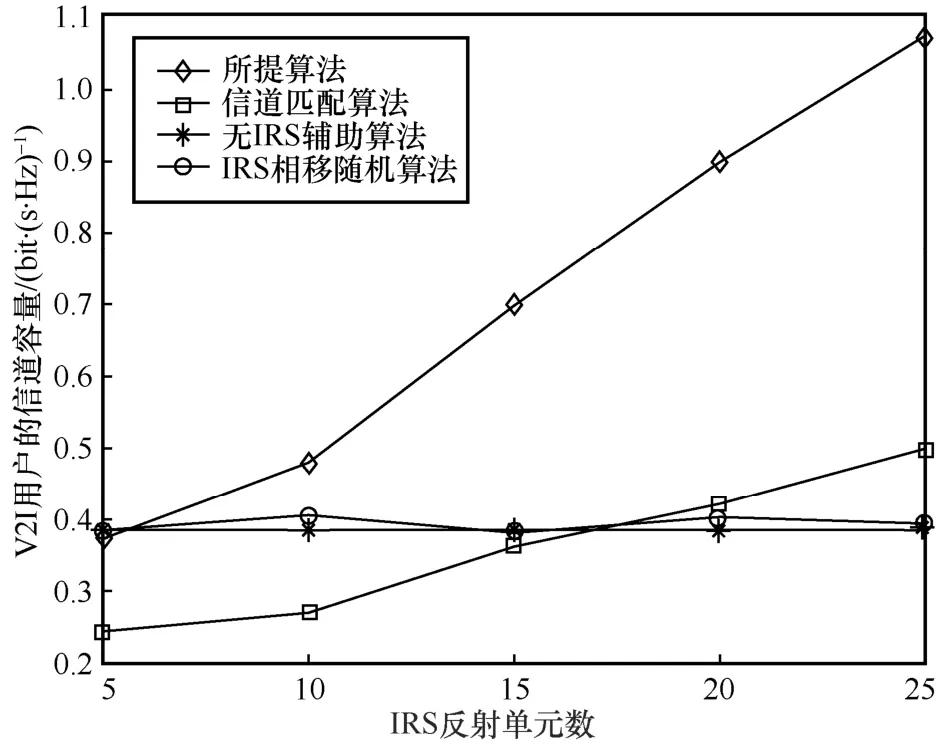
Нј4 І»Н¬Лг·ЁөДРЕөАИЭБҝУлIRS ·ҙЙдөҘФӘКэөД№ШПө
V2I УГ»§өДРЕөАИЭБҝУлIRS О»ЦГөД№ШПөИзНј5ЛщКҫЎЈ·ВХжЦР№М¶ЁБЛIRS өДyЦбәНzЦбЧшұкЈ¬Ц»ёДұдxЦбЧшұкЈ¬К№IRS ҙУ-100 m өҪ100 m ҪшРРТЖ¶ҜЎЈҪб№ыұнГчЈ¬ОЮВЫV2I УГ»§РРК»өҪ»щХҫЧуІа»№КЗУТІаЈ¬IRS ФҪҝҝҪь»щХҫРЕөАИЭБҝФҪҙуЎЈХв¶Ф№ӨіМЙПIRS ІҝКрО»ЦГөДСЎИЎМṩБЛІОҝјЎЈ
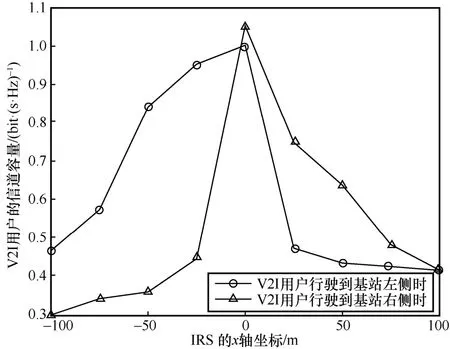
Нј5 РЕөАИЭБҝУлIRS О»ЦГөД№ШПө
І»Н¬өДёЙИЕВ·ҫ¶ЛрәДЦёКэПВV2I УГ»§өДРЕөАИЭБҝУліөЛЩөД№ШПөИзНј6 ЛщКҫЎЈЖдЦРЈ¬ҰБDCОӘD-VUE¶ФC-VUE өДёЙИЕВ·ҫ¶ЛрәДЦёКэЎЈҰБDCФҪҙуЈ¬ФтV2IУГ»§өДРЕөАИЭБҝФҪёЯЈ¬ХвКЗТтОӘD-VUE ¶ФC-VUEөДёЙИЕұдИхЎЈЛжЧЕЖҪҫщіөЛЩөДФцјУЈ¬V2I УГ»§өДРЕөАИЭБҝіКПЦПИФцјУәујхЙЩөДЗчКЖЈ¬ХвЦЦПЦПуУЙТФПВ2 ёцТтЛШөјЦВЈә1) D-VUE әНC-VUE өДёЙИЕВ·ҫ¶ҫаАлЈ»2) D-VUE өД·ўЙд№ҰВКЎЈөұіөЛЩФцҙуЈ¬іөБҫјдЖҪҫщҫаАлФцҙуКұЈ¬D-VUE әНC-VUE Ц®јдөДёЙИЕҫаАлФцјУЈ¬К№C-VUE өДҪУКХёЙИЕјхЙЩЈ¬C-VUE РЕөАИЭБҝФцҙуЈ»ө«өұіөЛЩФцҙуөҪТ»¶ЁіМ¶ИЈ¬D-VUE КХ·ў¶ЛҫаАлФцҙуөҪУ°ПмЖдЧоРЎЛЩВКРиЗуөДКөПЦКұЈ¬ОӘБЛВъЧгЛЩВКРиЗуЈ¬D-VUE ·ўЛН¶ЛРиТӘФцјУ·ўЙд№ҰВКЈ¬ХвСщФт¶ФC-VUEөДёЙИЕФцјУЈ»өұФцјУ·ўЙд№ҰВКІъЙъөДёЙИЕі¬№эФцјУҫаАлјхЙЩөДёЙИЕКұЈ¬V2I УГ»§өДРЕөАИЭБҝҝӘКјјхЙЩЎЈ
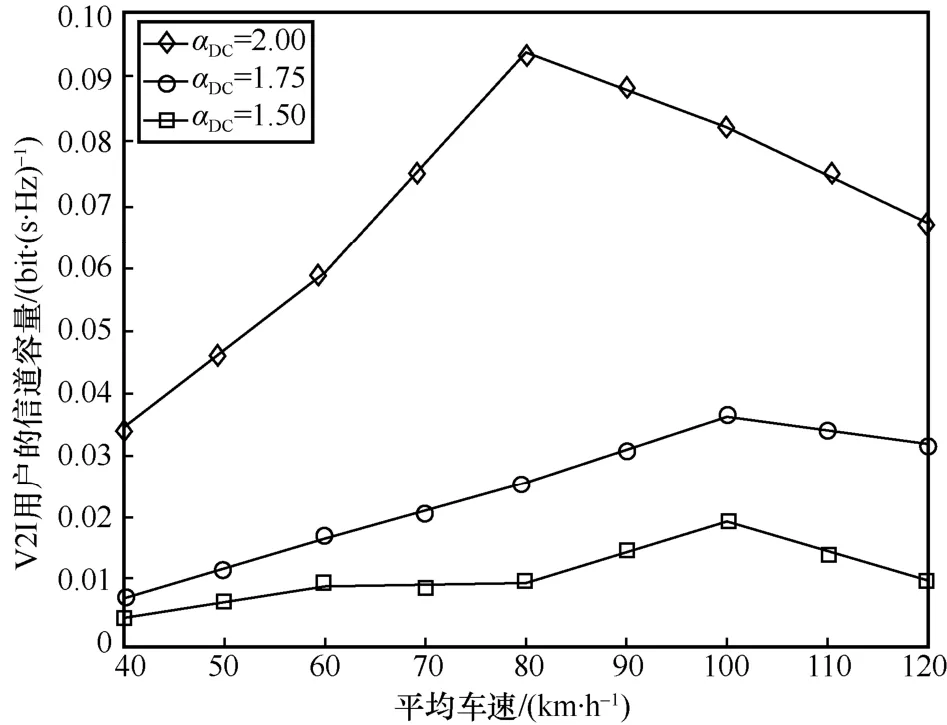
Нј6 РЕөАИЭБҝУліөЛЩөД№ШПө
4 ҪбКшУп
»щУЪIRS ёЁЦъіөБӘНшНЁРЕДЬ№»МбЙэёІёЗЗҝ¶ИәНФцЗҝ·ҙЙдРЕәЕөДМШөгЈ¬Хл¶ФIRS ёЁЦъөДMIMOіөБӘНшПөНіЈ¬ұҫОДМбіцБЛТ»ЦЦV2I әНV2V №ІҙжПВөДБӘәПІЁКшіЙРОЙијЖ·Ҫ°ёЎЈФЪВъЧгV2V УГ»§КэҫЭЛЩВКРиЗуЎўV2I »щХҫ·ўЙд№ҰВККЬПЮТФј°IRS ·ҙЙдПаТЖДЈФјКшөИМхјюПВЈ¬НЁ№эЧоҙу»ҜV2I УГ»§өДРЕөАИЭБҝЈ¬ёшіцБЛЧоУЕөД»щХҫ·ўЛНФӨұаВлҫШХуәНIRS·ҙЙдПаТЖҫШХуЎЈАыУГMMSE №жФтЦӨГчБЛ·ЗН№өДЛЩВКәҜКэҝЙТФөИјЫН№»ҜЈ¬К№УГҫШХу·ЦОцәНДЪұЖЛг·Ё¶ФТюКҪ·ЗН№ФјКшҪшРРЧӘ»»Ј¬МбіцБЛТ»ЦЦҪ»МжөьҙъУЕ»ҜЛг·ЁЎЈ·ВХжҪб№ыұнГчЈә1) ЛщМбЛг·ЁҫЯУРҪПҝмөДКХБІЛЩ¶ИЈ»2) ЛщМбЛг·ЁГчПФУЕУЪОЮIRS өДЗйРОЈ¬ЗТЛжЧЕIRS ·ҙЙдөҘФӘКэөДФцјУРФДЬМбЙэёьјУПФЦшЈ»3) ФЪіөБӘНшЦРЈ¬IRS ЧоККТЛІҝКрФЪ»щХҫёҪҪьЈ¬ЗТV2I УГ»§РЕөАИЭБҝФЪККөұЖҪҫщіөЛЩПВІЕДЬИЎөГЧоҙуЦөЎЈ