ЈЁ1.ЦР№ъТЖ¶ҜНЁРЕјҜНЕУРПЮ№«ЛҫЈ¬ұұҫ© 100032Ј»2.ЦР№ъТЖ¶ҜНЁРЕУРПЮ№«ЛҫСРҫҝФәЈ¬ұұҫ© 100053Ј©
0 ТэСФ
ГжПт2030 ДкЈ¬6G Ҫ«НЖ¶ҜЙз»бЧЯПтЎ°КэЧЦВПЙъЎұәНЎ°ЦЗ»Ы·әФЪЎұЈ¬КөПЦРйДвКАҪзәНОпАнКАҪзөДИЪәПҪ»»Ҙ[1]ЎЈЦЗ»Ы№ӨТөЎўЦЗДЬҪ»НЁЎўЦЗ»ЫТҪБЖЎўЦЗДЬҪ»»ҘөИРВРЛТөОсіЎҫ°өДІ»¶ПУҝПЦЈ¬Зэ¶ҜЧЕНЁРЕЎўјЖЛгЎўИЛ№ӨЦЗДЬЎўҙуКэҫЭЎў°ІИ«өИјјКхөДЙо¶ИИЪәП[2]ЎЈіэҙ«НіНЁРЕДЬБҰөДМбЙэЦ®НвЈ¬6G НшВз»№Ҫ«ҙтФмУлНЁРЕИЪәПОӘТ»МеөДјЖЛгЎўёРЦӘЎўИЛ№ӨЦЗДЬәН°ІИ«өИИ«РВДЬБҰЈ¬ТФёьәГөШЦ§іЦОҙАҙИ«РВөДУҰУГіЎҫ°РиЗуЎЈФЪ№ӨТө»ҘБӘНшЎўОЮИЛ»ъЎўіөБӘНшөИУҰУГіЎҫ°ЦРЈ¬РЕПўҪ»»ҘөДО¬¶ИТСҫӯҙУҙ«НіөДРЕПўҙ«өЭА©Х№өҪРЕПўІЙјҜЎўРЕПўјЖЛг[3]Ј¬О»ЦГәНДҝұкёРЦӘДЬБҰәННЁРЕДЬБҰТСҫӯіЙОӘІ»ҝЙ»тИұөДДЬБҰРиЗуЎЈЛщТФЈ¬ёРЦӘәННЁРЕөДИЪәПТСҫӯіЙОӘ6G СРҫҝөДЦШТӘ·ҪПтЈ¬¶шТЖ¶ҜНЁРЕПөНіУлАЧҙпёРЦӘПөНіФЪРЕПўҙҰАнБчіМЎў№ӨЧчЖө¶ОЎўҙу№жДЈМмПЯХуБРУҰУГөИ·ҪГжіКПЦіцөДёЯ¶ИПаЛЖРФТІОӘ¶юХЯөДИЪәПМṩБЛ»щҙЎЎЈ
НЁРЕёРЦӘТ»Ме»ҜјјКхНЁ№эҙ«КдРЕәЕТ»Ме»ҜЎўУІјюјЬ№№Т»Ме»ҜөИБӘәППөНіЙијЖЈ¬ҝЙФЪН¬Т»МЧЙиұёЎўН¬Т»¶ОЖөЖЧЙПЈ¬Н¬КұКөПЦНЁРЕУлёРЦӘ№ҰДЬЈ¬ҙшАҙЙиұёіЙұҫҪөөНЎўЖөЖЧАыУГВКМбЙэөИФцТж[4]ЎЈТ»·ҪГжЈ¬НЁРЕёРЦӘТ»Ме»ҜК№»щХҫҫЯұёНЁРЕЎўДҝұкјмІвЎўёЯҫ«¶ИІвҫаІвЛЩЈ¬ТФј°ДҝұкіЙПсәНК¶ұрөДДЬБҰЈ¬ҝЙТФёьәГөШВъЧгЦЪ¶аИ«РВУҰУГіЎҫ°өДРиЗу[5-6]Ј¬°ьАЁОЮИЛ»ъЎў№ӨТө»ҘБӘНшәНіөБӘНшөИ»·ҫіПВөДҪ»НЁЧҙМ¬јаҝШЎўөНҝХЧҙМ¬јаҝШЎўЖыіө¶ФЧФ¶ҜјЭК»»·ҫіөДёРЦӘЎў»ъЖчИЛЦ®јдөДҪ»»ҘөИЎЈБнТ»·ҪГжЈ¬ёРЦӘРЕПў·ҙ№эАҙТІҝЙТФУГУЪёЁЦъНЁРЕНшВзөДІҝКрУлІОКэЕдЦГөДУЕ»ҜЎЈ
НЁРЕёРЦӘТ»Ме»ҜјјКхЧчОӘ6G өДИИөгСРҫҝ·ҪПтЈ¬С§КхҪз¶ФЖдҪшРРБЛҙуБҝөДСРҫҝЎЈОДПЧ[7-10]¶ФНЁРЕёРЦӘТ»Ме»ҜөД·ўХ№ТФј°ОҙАҙСРҫҝЗчКЖҪшРРБЛПкПёөДМЦВЫЈ¬ІўҙУРФДЬХЫЦРЎўРЕәЕҙҰАнЎўНЁРЕёЁЦъёРЦӘЎўёРЦӘёЁЦъНЁРЕЛДҙу·ҪГжІыКцБЛНЁРЕёРЦӘТ»Ме»ҜУЕКЖТФј°РӯЧчФцТжЎЈХл¶ФЦЗДЬҪ»НЁј°ЧФ¶ҜјЭК»өДіЎҫ°Ј¬ОДПЧ[11]¶ФөчЖөБ¬РшІЁАЧҙпЎў¶аКдИл¶аКдіцЈЁMIMO,multiple input multiple outputЈ©АЧҙпЎўЖөВКҪЭұдАЧҙпЎўХэҪ»Жө·ЦёҙУГЈЁOFDM,orthogonal frequency division multiplexingЈ©АЧҙпөИёРЦӘ·ҪКҪҪшРРБЛід·ЦөД·ЦОцУл¶ФұИЎЈҙЛНвЈ¬Хл¶ФОЮИЛ»ъіЎҫ°Ј¬ОДПЧ[12-14]ҙУОЮИЛ»ъЦ®јдөДНЁРЕУлёРЦӘ№ҰДЬЎўОЮИЛ»ъ¶ФөШГжОпМеөДёРЦӘЎўТЖ¶ҜНшВзУлОЮИЛ»ъЦ®јдөДНЁРЕёРЦӘТ»Ме»ҜөИ·ҪГжҪшРРБЛПкПёөДМЦВЫЎЈіэБЛ¶ФУҰУГіЎҫ°Ўў·ўХ№ЗчКЖУлјјКхМфХҪөДСРҫҝЈ¬Хл¶ФНЁРЕёРЦӘТ»Ме»Ҝ»щҙЎАнВЫөДСРҫҝКЗёГ·ҪПтөДјјКхёщ»щЎЈПа№ШС§ХЯ¶ФНЁРЕУлёРЦӘТ»Ме»ҜПөНіЦРөДҝЛАӯГАВЮҪзҪшРРБЛПөНіөДНЖөј[15-17]ЎЈҙЛНвЈ¬ОДПЧ[18]Хл¶ФНЁРЕёРЦӘТ»Ме»ҜөДРЕөАЈ¬АыУГИрАыРЕПўмШ¶ЁТеБЛёРЦӘөДЧФУЙ¶ИЈ¬ІўТФҙЛАҙ·ЦОцНЁРЕУлёРЦӘТ»Ме»ҜПөНіөД·ЦјҜФцТжЎЈ
»щУЪПЦУР·дОСНшВзOFDM ІЁРОҪшРРНЁРЕёРЦӘТ»Ме»ҜЙијЖЈ¬КөПЦ¶ФДҝұкОпМеөДёРЦӘЈ¬КЗДҝЗ°НЁРЕёРЦӘТ»Ме»ҜСРҫҝөДјјКхВ·ПЯЦ®Т»Ј¬ҝЙЧоҙуіМ¶ИҪөөН¶ФНЁРЕПөНіөДЙијЖәНУІјюөДУ°ПмЈ¬ҫЯУРёьәГөДІъТөҝЙКөПЦРФЎЈұҫОДСРҫҝҪ«О§ИЖХвТ»јјКхВ·ПЯХ№ҝӘЎЈНЁ№э¶ФКХ·ў¶ЛOFDM РЕәЕҪшРРБӘәПҙҰАнЈ¬ҝЙАыУГЦЬЖЪНј·ЁөГөҪёРЦӘДҝұкөДО»ЦГРЕПў[4,19-20]ЎЈіэБЛЦЬЖЪНј·ЁЈ¬ОДПЧ[21-23]АыУГРЕәЕ-ФлЙщЧУҝХјд·ЦАлөД·Ҫ·ЁЈ¬ҝЙТФөГөҪДҝұкОпМеөДҫаАлЎўЛЩ¶ИЎўҪЗ¶ИөИРЕПўЎЈОДПЧ[24-25]¶ФOFDM НЁРЕёРЦӘТ»Ме»ҜПөНіөД№ҰВК·ЦЕдЎўЕФ°кёЙИЕЎў·еҫщұИөИ·ҪГжМбіцБЛ¶ФУҰЛг·ЁІўҪшРРБЛУЕ»ҜЎЈҙЛНвЈ¬Хл¶ФЙдЖөУІјюјЬ№№Ј¬ОДПЧ[26-27]¶Ф№ҰВК·ЕҙуЖчЎўЖөВКәПіЙЖчЎў»мЖөЖчөИҪшРРБЛЙијЖЈ¬ІўҪшРРБЛКөСйУлөчІвЎЈХл¶ФөҘХҫёРЦӘөДіЎҫ°Ј¬ОДПЧ[28]»щУЪOFDM РЕәЕҪшРРПөНіЙијЖЈ¬ІўХл¶ФКХ·ўјдЧФёЙИЕОКМвМбіцБЛЙдЖөУлТФј°КэЧЦУтөДҪвҫц·Ҫ°ёЈ¬Іў¶ФҫІЦ№ДҝұкТФј°ТЖ¶ҜДҝұкҪшРРБЛёРЦӘөДНвіЎІвКФЎЈіэБЛөҘХҫёРЦӘөД·ҪКҪЈ¬ОДПЧ[23,29]өИ¶Ф¶аҪЪөгРӯЧчёРЦӘТІҪшРРБЛЙијЖЈ¬ІўХл¶ФЦЗДЬҪ»НЁіЎҫ°Ј¬АыУГOFDM РЕәЕ¶ФЖыіөЎўРРИЛөИҪшРРБЛёРЦӘ¶ЁО»ЎЈ
ЦөөГЧўТвөДКЗЈ¬ОДПЧ[19,23]ФЪРФДЬ·ЦОцУлПөНіЙијЖКұЈ¬ІаЦШУЪЛг·ЁФЪёРЦӘҫ«¶И·ҪГжөДРФДЬЈ¬ІўОҙ№э¶аөШМЦВЫНЁРЕРФДЬЎЈОДПЧ[5,7-8]ЛдИ»ҝјВЗБЛНЁРЕёРЦӘТ»Ме»ҜПөНіЦРөДІЁКшіЙРОЎўЦЎҪб№№ЎўёЙИЕ№ЬАнөИНЁРЕ·ҪГжөДЙијЖЈ¬ө«КЗІўОҙМЦВЫёРЦӘЧКФҙУлНЁРЕЧКФҙөД·ЦЕдОКМвЎЈФЪНЁРЕёРЦӘТ»Ме»ҜПөНіЦРЈ¬НЁРЕУлёРЦӘРФДЬПа»ҘсоәПЎЈТ»°г¶шСФЈ¬ФЪЧЬЧКФҙПаН¬өДЗйҝцПВЈ¬УГУЪёРЦӘөДЧКФҙФҪ¶аЈ¬НЁРЕРФДЬПВҪөФҪҙуЎЈУЙУЪІ»Н¬ёРЦӘЛг·ЁөДёРЦӘҫ«¶ИЎўҙпөҪДіТ»ёРЦӘҫ«¶ИКұЛщХјУГёРЦӘЧКФҙЎўјЖЛгёҙФУ¶ИІ»Н¬Ј¬ФЪНЁРЕёРЦӘТ»Ме»ҜПөНіЙијЖКұЈ¬НЁРЕРФДЬУлёРЦӘРФДЬөДБӘәПУЕ»ҜКЗК®·ЦұШТӘөДЎЈ
ұҫОДХл¶Ф·дОСНЁРЕёРЦӘТ»Ме»ҜПөНіЈ¬ТФұЈХПНЁРЕЛЩВКөДН¬КұКөПЦёРЦӘҫ«¶ИМбЙэОӘЧјФтЈ¬¶Ф3 ЦЦ»щУЪOFDM РЕәЕөД¶аДҝұкёРЦӘЛг·ЁҪшРР·ЦОцј°УЕ»ҜЙијЖЈ¬МбіцБЛТ»ЦЦЧФККУҰёРЦӘЛг·ЁЎЈёГЛг·ЁёщҫЭҪУКХРЕәЕУлёЙИЕјУФлЙщұИЈЁSINR,signal-to-interference-plus-noise ratioЈ©ІвБҝҪб№ыСЎФсәПККөДёРЦӘЛг·ЁКөПЦёРЦӘЎЈПаұИК№УГөҘТ»Лг·ЁЈ¬ЛщМбЛг·ЁҝЙұЈЦӨФЪНЁРЕЛЩВКІ»ұдөДЗйҝцПВЈ¬КөПЦёРЦӘҫ«¶ИөДМбЙэЎЈұҫОДЦчТӘҙҙРВөгИзПВЎЈ
1) ҪйЙЬБЛ3 ЦЦ¶аДҝұкёРЦӘЛг·ЁЈ¬¶ФЛг·ЁөДёРЦӘҫ«¶ИЎўёРЦӘЧКФҙХјУГЗйҝцј°НЁРЕРФДЬҪшРРБӘәП·ЦОцЈ¬Іў¶ФёРЦӘЛг·ЁөДёҙФУ¶ИҪшРР¶ЁБҝ·ЦОцУл¶ФұИЎЈ
2) ТФұЈХПНЁРЕЛЩВКІ»ұдөДН¬КұҫЎҝЙДЬМбЙэёРЦӘҫ«¶ИОӘУЕ»ҜЧјФтЈ¬МбіцБЛТ»ЦЦЧФККУҰёРЦӘЛг·ЁЎЈ
3) ФЪёш¶ЁөДПөНіІОКэПВЈ¬НЁ№эБҙВ·ј¶·ВХжЖҪМЁСйЦӨёЯЖөНЁРЕёРЦӘТ»Ме»ҜПөНіІ»Н¬Лг·ЁөДёРЦӘРФДЬј°јЖЛгёҙФУ¶ИРФДЬЎЈ
1 ПөНіДЈРН
ИзНј1 ЛщКҫЈ¬ұҫОДХл¶ФТЖ¶Ҝ·дОСНшВзЈ¬СРҫҝНЁРЕёРЦӘТ»Ме»ҜјјКхөДёРЦӘЛг·ЁЙијЖОКМвЈ¬АыУГПЦУР·дОСНшВзЦР№жДЈІҝКрөД»щҙЎЙиК©ј°НшВзјЬ№№Ј¬КөПЦөНіЙұҫЎў№гёІёЗ·¶О§өДНЁРЕәНёРЦӘЎЈёГНЁРЕёРЦӘТ»Ме»ҜПөНіН¬КұҫЯұёНЁРЕУлёРЦӘ№ҰДЬЈ¬ЖдЦР»щХҫЈЁBS,base stationЈ©ФЪУлУГ»§ҪшРРКэҫЭҙ«КдөДН¬КұЈ¬ҝЙНЁ№э·ўЙдёРЦӘРЕәЕІўҪУКХ¶ФУҰөД»ШІЁРЕәЕЈ¬НкіЙОҙЦӘДҝұкөДјмІвј°ҫаАлУлЛЩ¶И№АјЖөИёРЦӘИООсЎЈОӘјхЙЩ/ұЬГв¶ФПЦУРТЖ¶ҜНЁРЕНшВзУІјюөДҙу·щёДФмЈ¬ұҫОДҝјВЗФЪПЦУРТЖ¶ҜНЁРЕНшВз»щҙЎЙПФцјУёРЦӘ№ҰДЬЈ¬јҙАыУГНЁРЕіЈУГөДOFDM РЕәЕ¶ФОҙЦӘДҝұкҪшРР№АјЖЎЈ
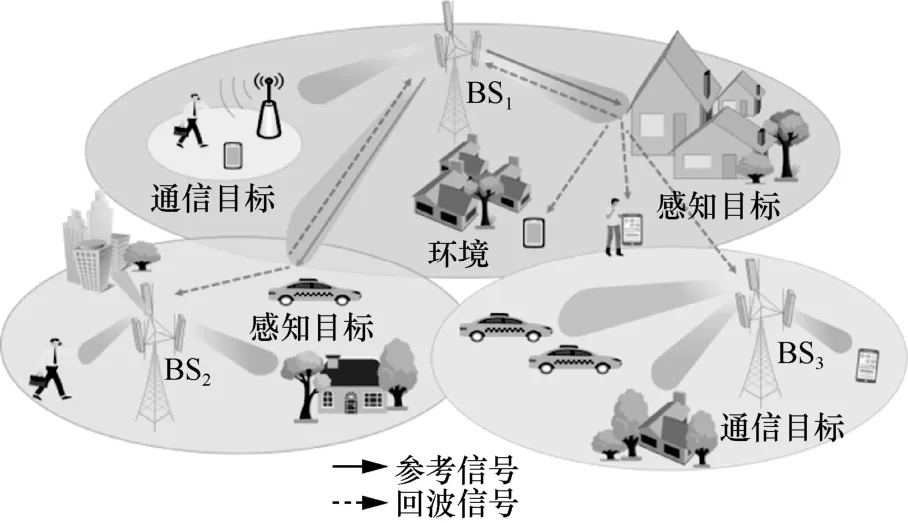
Нј1 НЁРЕёРЦӘТ»Ме»ҜПөНі
¶ФУЪГҝҙОёРЦӘЈ¬BS ·ўЙдУГУЪёРЦӘөДOFDM РЕәЕЈ¬јЩЙиёГРЕәЕУЙKёцЧУФШІЁәНLёц·ыәЕ№№іЙЈ¬ЧУФШІЁјдёфОӘҰӨfЈ¬КэҫЭҙ«КдКұіӨОӘЎЈТэИлКұјдіӨ¶ИОӘTCPөДСӯ»·З°ЧәЈЁCP,cyclic prefixЈ©Аҙ¶Фҝ№¶аҫ¶ёЙИЕЈ¬Т»ёцOFDM ·ыәЕөДіЦРшКұјдОӘTOFDM=T+TCPЎЈТтҙЛЈ¬·ўЙд¶ЛУГУЪёРЦӘөДOFDM »щҙшРЕәЕұнКҫОӘ
ЖдЦРЈ¬sl(k)ОӘөЪkёцЧУФШІЁЙПөЪlёц·ыәЕ¶ФУҰіРФШөДөчЦЖ·ыәЕЈ»f k=kҰӨfОӘөЪkёцЧУФШІЁ¶ФУҰөДЖөВКЈ»ОӘ·ҪІЁЈ¬УГУЪГиКцөЪlёцOFDM ·ыәЕөДҫШРОҙ°Ј¬ЖдјЖЛгКҪОӘ
OFDM ёРЦӘРЕәЕҫӯ№эҙэІвДҝұк·ҙЙдәуөҪҙпҪУКХ¶ЛЈ¬ҫӯ№эЖҘЕдВЛІЁЎўCP ЙҫіэәНАлЙўёөАпТ¶ұд»»өИ№эіМЈ¬ҪУКХ¶ЛҙУ»щҙшҪУКХРЕәЕЦРМбИЎҫаАлј°ЛЩ¶ИРЕәЕЎЈјЩЙиФЪBS ёРЦӘ·¶О§ДЪУРMёцҙэІвДҝұкЈ¬өЪmёцДҝұкУл»щХҫөДПа¶ФҫаАлј°Па¶ФЛЩ¶И·ЦұрОӘRmәНvmЈ¬ФтҪУКХРЕәЕ»бФЪФӯКј·ўЙдРЕәЕөД»щҙЎЙПТэИлУЙҙ«КдКұСУј°¶аЖХАХЖөТЖөјЦВөДПаО»ІоЎЈТтҙЛЈ¬ҪУКХКұУтРЕәЕҝЙұнКҫОӘ
ЖдЦРЈ¬hm,kОӘРЕөАФцТжЈ¬cОӘ№вЛЩЈ¬ҰЛОӘІЁіӨ,n(t)ОӘ°ЧФлЙщЈ¬·юҙУҫщЦөОӘ0Ўў·ҪІоОӘҰД2өДёЯЛ№·ЦІјЎЈ
ҪУКХөДКұУтРЕәЕҫӯ№эёөАпТ¶ұд»»Ј¬өГөҪЖөУтРЕәЕҝЙұнКҫОӘ
ОӘұгУЪ№ЫІмЈ¬Ҫ«·ўЙд¶ЛУлҪУКХ¶ЛOFDM ·ыәЕ·ЦұрХыАніЙ¶юО¬РЕәЕҫШХуРОКҪЈ¬ИзКҪ(4)әНКҪ(5)ЛщКҫЎЈ¶юО¬РЕәЕҫШХуөДГҝТ»РРОӘТ»ёцЧУФШІЁЙПөДҙ«КдКэҫЭЈ¬ГҝТ»БРОӘТ»ёцOFDM ·ыәЕЙПөДҙ«КдКэҫЭЎЈ
2 OFDM ¶аФШІЁёРЦӘЛг·Ё
2.1 2D-DFT ёРЦӘЛг·Ё
¶юО¬АлЙўёөАпТ¶ұд»»ЈЁ2D-DFT,two dimensional-discrete Fourier transformЈ©Лг·ЁКЗҪПіЈјыөДOFDM ёРЦӘЛг·Ё[20]Ј¬ЖдәЛРДКЗ¶ФКұЖөУтРЕөАРЕПўҫШХуҪшРР¶юО¬АлЙўёөАпТ¶ұд»»Ј¬Ҫ«КұЖөУтРЕөАЧӘ»»ЦБКұСУ¶аЖХАХУтЎЈИ»әуНЁ№э¶ФКұСУ¶аЖХАХУтөДЦЬЖЪНјЖЧҪшРРЖЧ·еЛСЛчЈ¬№АјЖёРЦӘДҝұкУл»щХҫЦ®јдөДКұСУј°¶аЖХАХРЕПўЈ¬Ҫш¶шөГөҪДҝұкОпМеөДҫаАлј°ЛЩ¶ИРЕПўЎЈХвЦЦНЁ№э¶юО¬АлЙўёөАпТ¶ұд»»Ҫ«КұЖөУтРЕөАЧӘ»»ЦБКұСУ¶аЖХАХУтөД·Ҫ·ЁЈ¬К№ёРЦӘДҝұкөДКұСУј°¶аЖХАХРЕПўөДХ№ПЦёьјУЦұ№ЫЎЈПаұИУЪЦұҪУҙҰАнКұЖөУтРЕөАЈ¬2D-DFT ёьТЧУЪКөПЦёЯҫ«¶ИёРЦӘЎЈ
2D-DFT Лг·ЁөДҫЯМеКөПЦИзПВЎЈБо·ўЙдРЕәЕҫӯ№эёРЦӘДҝұкm·ҙЙдЦБҪУКХ¶ЛКұөДҙ«ІҘКұСУОӘҰУmЈ¬¶аЖХАХОӘfD,mЈ¬Ҫ«ҪУКХРЕәЕУл·ўЙдРЕәЕҪшРРөгіэЈ¬МбИЎРЕөАРЕПўЈ¬өГөҪРЕөАЧӘ»»әҜКэTdivЎЈ
ЖдЦРЈ¬FTx(k,l)ј°FRx(k,l)·ЦұрКЗөЪlёц·ыәЕЎўөЪkёцЧУФШІЁЙПөД»щҙш·ўЛНј°ҪУКХOFDM РЕәЕЈ¬hmКЗөЪmёцДҝұкөДРЕөАФцТжЈ¬nk,lЎ«CN(0,ҰТ2)КЗјУРФ°ЧёЯЛ№ФлЙщЎЈөұёРЦӘДҝұкmәН»щХҫөДҫаАлОӘRmКұЈ¬¶ФН¬Т»ёцOFDM ·ыәЕЈ¬ГҝёцЧУФШІЁ»бҫӯАъКұСУЎЈјЩЙиёРЦӘДҝұкҫІЦ№Ј¬Фт¶ФУЪИОТвOFDM·ыәЕlЈ¬Жд¶ФУҰөДРЕөАЧӘ»»әҜКэОӘ
АаЛЖөШЈ¬өұёРЦӘДҝұкmәН»щХҫөДПа¶ФЛЩ¶ИОӘvmКұЈ¬¶ФУЪН¬Т»ёцЧУФШІЁЈ¬ГҝТ»ёцOFDM ·ыәЕ»бҫӯАъПЯРФЖөЖ«Ј¬ёГЖөЖ«КЗУЙ¶аЖХАХЖөВКТэЖрөДЎЈИфЦ»ҝјВЗ¶аЖХАХЖөЖ«Ј¬Фт¶ФУЪИОТвЧУФШІЁkЈ¬Жд¶ФУҰөДРЕөАЧӘ»»әҜКэОӘ
Н¬СщөШЈ¬өұКҪ(11)ЦРЦёКэПоөЦПыКұЈ¬ИЎөҪЧоҙуЦөЎЈТтҙЛЈ¬¶ФДҝұкm=1,Ўӯ,MЈ¬Ц»РиХТөҪ {g(q) }q=1,Ўӯ,Q·еЦө¶ФУҰөДЛчТэqmax_index,mЈ¬јҙҝЙЗуіцДҝұкЛЩ¶ИvmОӘ
ёщҫЭЙПКц·ЦОцЈ¬2D-DFT Лг·ЁөДәЛРДКЗ¶ФTdivөДГҝБРЈЁјҙЖөВКЦбЈ©ЧцIDFTЈ¬Іў¶ФГҝРРЈЁјҙКұјдЦбЈ©ЧцDFTЈ¬өГөҪЖдЦЬЖЪНјЖЧІўХТөҪ·еЦөЈ¬ёГ·еЦө¶ФУҰөД¶юО¬ЛчТэјҙДҝұкОпМеөДҫаАләНЛЩ¶ИРЕПўЎЈЦЬЖЪНјЖЧ·ЁИзЛг·Ё1 ЛщКҫЎЈ
Лг·Ё1ЦЬЖЪНјЖЧ·Ё
іхКј»ҜёРЦӘЧУФШІЁјҜKЈ¬ёРЦӘ·ыәЕјҜLЈ¬ёРЦӘДҝұкёцКэM
2.2 РэЧӘІ»ұдЧУҝХјд·Ё
ұҫҪЪёшіцБЛТ»ЦЦ»щУЪРэЧӘІ»ұдЧУҝХјд[22]ЈЁESPRITЈ©өДёРЦӘЛг·ЁЈ¬КөПЦ¶ФёРЦӘДҝұкөДІвҫаУлІвЛЩЎЈКЧПИЈ¬Ҫ«ҪУКХРЕәЕ·ЦіЙПаО»ІоПаөИЗТҪцУлКұСУПа№ШөДБҪЧйЎЈёГПаО»Іоұ»іЖОӘРэЧӘІ»ұдТтЧУЎЈЖдҙОЈ¬НЁ№э¶ФҪУКХРЕәЕРӯ·ҪІоҫШХуҪшРР№АјЖЈ¬»сөГБҪЧйРЕәЕјдРэЧӘІ»ұдТтЧУЎЈЧоәуЈ¬НЁ№эРэЧӘІ»ұдТтЧУУлКұСУөД№ШПө¶ФёРЦӘДҝұкөДКұСУҪшРР№АјЖЎЈҪ«OFDM ·ыәЕУлЧУФШІЁ»Ҙ»»Ј¬ІЙУГПаН¬Лг·ЁҝЙКөПЦ¶ФёРЦӘДҝұк¶аЖХАХөД№АјЖЎЈ
2.2.1 КэҫЭ·ЦЧй
Ҫ«ҪУКХРЕәЕy(t)ҪшРРЖҘЕдВЛІЁЈ¬ҝЙөГөҪТ»Чй№йТ»»Ҝ»щҙшOFDM ҪУКХРЕәЕОӘ
ОӘФлЙщПтБҝЎЈКҪ(13)ҝЙРҙОӘ
ОӘ№АјЖКұСУЈ¬Ҫ«yІр·ЦОӘy1ј°y2Ј¬К№Ждёчёц¶ФУҰФӘЛШјдПаО»ІоПаөИЗТУліэКұСУНвЖдЛыОҙЦӘБҝОЮ№ШЎЈАэИзЈ¬ИЎy1ОӘyөДөЪТ»О»ЦБө№КэөЪ2 О»ФӘЛШЈ¬ИЎy2ОӘyөДөЪ2 О»ЦБЧоәуТ»О»ФӘЛШЎЈҙЛКұЈ¬y1Улy2¶ФУҰФӘЛШПаО»ІоОӘ2ҰРҰӨfҰУmЎЈёщҫЭКэС§НЖөјҝЙөГ
ЖдЦРЈ¬phase{a} ұнКҫИЎФӘЛШaөДПаО»ЎЈ
2.2.2 РэЧӘІ»ұдТтЧУ№АјЖ
ұҫҪЪёшіц»щУЪESPRIT өД№АјЖЛг·ЁЎЈҪ«ПтБҝy1Улy2¶Сөю№№іЙПтБҝy3=((y1)T,(y2)T)TЈ¬Ҫ«ҫШХуF1УлF2¶Сөю№№іЙҫШХуF3=((F1)T,(F2)T)TЈ¬ФтУР
ЖдЦРЈ¬n3КЗ¶ФУҰөДФлЙщПтБҝЎЈПВГжЈ¬ұҫОДЛг·ЁҪ«НЁ№эy1Улy2№АјЖРэЧӘІ»ұдТтЧУЎЈОӘҙЛЈ¬¶ЁТеaөДРӯ·ҪІоҫШХуОӘRaЈ¬ёщҫЭКҪ(21)ҝЙөГ
ЖдЦРЈ¬IКЗО¬КэОӘ2(K-1)ЎБLөДөҘО»ҫШХуЎЈ¶ЁТеRaөДЗ°MёцЧоҙуМШХчПтБҝ№№іЙөДМШХчҫШХуОӘEaЎЈУЙУЪёРЦӘПөНіҙжФЪMёцёРЦӘДҝұкЗТКҪ(21)іЙБўЈ¬УлF3·ЦұрА©ХЕіЙБЛy3өДРЕәЕҝХјдЎЈТтҙЛЈ¬ҙжФЪТ»ёц·ЗЖжТмҫШХуTЈ¬К№КҪ(24)іЙБўЎЈ
ёщҫЭКҪ(19)ҝЙөГ
КҪ(25)ұнГчРэЧӘІ»ұдТтЧУҰөКЗҫШХуҰГөДМШХчҫШХуЈ¬З°ХЯҝЙУЙ¶ФҫШХуҰГҪшРРМШХчЦө·ЦҪвөГөҪЎЈТтҙЛРэЧӘІ»ұдТтЧУөД№АјЖҝЙЧӘ»ҜОӘ¶ФҫШХуҰГөД№АјЖЎЈУЙУЪҝЙУЙy1,y2,y3јЖЛгіцЈ¬ёщҫЭКҪ(25)Ј¬НЁ№эЧоРЎ¶юіЛ·ЁЈ¬ҰГөД№АјЖЦөҝЙУЙКҪ(27)јЖЛгөГіцЎЈ
ЧЫәПұҫҪЪДЪИЭЈ¬ESPRIT Лг·ЁИзЛг·Ё2 ЛщКҫЎЈ
Лг·Ё2ESPRIT Лг·Ё
іхКј»ҜёРЦӘЧУФШІЁјҜKЈ¬ёРЦӘ·ыәЕјҜLЈ¬ёРЦӘДҝұкёцКэM
Ҫ«ҪУКХРЕәЕөД·ыәЕУлЧУФШІЁ»Ҙ»»Ј¬ІЙУГПаН¬Лг·ЁјҙҝЙөГөҪ¶ФёРЦӘДҝұк¶аЖХАХөД№АјЖЎЈНЁ№эАаЛЖөДАнВЫНЖөјЈ¬ФЪҪшРР¶аЖХАХ№АјЖКұЈ¬РэЧӘІ»ұдТтЧУЎЈФЪөГөҪөД№АјЖЦ®әуЈ¬ёРЦӘДҝұкөД№АјЖЛЩ¶ИУЙКҪ(29)өГіцЎЈ
2.3 ¶аЦШРЕәЕ·ЦАаЛг·Ё
¶аЦШРЕәЕ·ЦАаЈЁMUSIC,multiple signal classificationЈ©Лг·ЁКЗТ»ЦЦҫӯөдөД»щУЪРЕәЕЧУҝХјдәНФлЙщЧУҝХјдХэҪ»РФөДЖЧ·еЛСЛчЛг·Ё[30]Ј¬ТСФЪҪЗ¶И№АјЖЦРөГөҪ№г·әУҰУГЎЈұҫҪЪТАҫЭOFDM ПөНіЦРХэҪ»өДЧУФШІЁј°·ыәЕУлІвПтЦРХуФӘМмПЯөДПаЛЖРФЈ¬ҪшТ»ІҪУҰУГMUSIC Лг·ЁКөПЦ¶аДҝұкөДІвЛЩУлІвҫаЈ¬јҙИзәОАыУГMUSIC Лг·Ё»сИЎДҝұкөДКұСУј°¶аЖХАХРЕПўЎЈФЪЛг·ЁКөПЦ№эіМЦРЈ¬Ҫ«»щУЪЖөУтЦбЙПөИјдёфөДЧУФШІЁ№№ҪЁКұСУөјПтКёБҝТФ»сөГҙэІвДҝұкөДКұСУРЕПўЈ¬АаЛЖөШЈ¬Ҫ«»щУЪКұјдЦбЙПөИјдёфөДOFDM ·ыәЕ№№ҪЁ¶аЖХАХөјПтКёБҝТФ»сөГҙэІвДҝұкөД¶аЖХАХРЕПўЎЈ
ёщҫЭКҪ(6)Ј¬ҪшТ»ІҪ·ЦОцРЕөАЧӘ»»әҜКэTdivҝЙЦӘЈ¬ҪУКХ»ъУлДҝұкјдөДПа¶ФҫаАлФЪБ¬РшЧУФШІЁЙПөДөчЦЖ·ыәЕЦ®јдТэИлПЯРФЖөЖ«Ј¬Па¶ФЛЩ¶И¶ФУҰөД¶аЖХАХЖөТЖФЪБ¬РшөДOFDM ·ыәЕјдТэИлПЯРФПаО»ЎЈҙЛНвЈ¬КұСУј°¶аЖХАХЖөТЖ¶ФөчЦЖ·ыәЕФміЙөДУ°ПмПа»Ҙ¶АБўЗТХэҪ»ЎЈ
ПВГж»щУЪПа¶ФҫаАлј°Па¶ФЛЩ¶И¶ФөчЦЖУтOFDM ·ыәЕУ°ПмөДХэҪ»РФКөПЦКұСУј°¶аЖХАХІОКэ№АјЖЎЈКЧПИЈ¬јЖЛг»ШІЁРЕәЕөДРӯ·ҪІоҫШХуЎЈёщҫЭЙПКц·ЦОцЈ¬РиТӘҙУTdivөДГҝБРј°ГҝРРЧФПа№ШҫШХуЦР·ЦұрМбИЎКұСУј°¶аЖХАХРЕПўЈ¬№№ФмІвҫај°ІвЛЩРӯ·ҪІоҫШХу·ЦұрОӘ
ЖдҙОЈ¬»щУЪРӯ·ҪІоҫШХу№№ҪЁФлЙщЧУҝХјдЎЈҪ«Рӯ·ҪІоҫШХуRRУлRvЖжТмЦө·ЦҪвЈ¬·ЦұрАыУГРЎМШХчЦө¶ФУҰөДМШХчКёБҝ№№ҪЁФлЙщЧУҝХјдURәНUvЎЈ
ФЩҙОЈ¬№№ҪЁёРЦӘРЕәЕөјПтКёБҝЎЈёщҫЭ·ўЙдРЕәЕөДКұЖөҪб№№Ј¬ҝЙ№№ҪЁЖөУтЦбәНКұУтЦб¶ФУҰөДРЕәЕөјПтКёБҝЈ¬·ЦұрұнКҫОӘ
ЧоәуЈ¬ҪшРРЖЧ·еЛСЛчТФ»сөГДҝұкөДҫаАлј°ЛЩ¶ИЎЈУЙУЪФлЙщөДҙжФЪЈ¬ФлЙщЧУҝХјдУлРЕәЕЧУҝХјдІўІ»НкИ«ХэҪ»Ј¬ТтҙЛФЪјЖЛгКұЛСЛчКҪ(4)өД·еЦөЈ¬ІвҫаәНІвЛЩөДЖЧ·еЛСЛчКҪҝЙұнКҫОӘ
Ҫ«КҪ(32)әНКҪ(33)ЦРөДRәНvЧчОӘұдБҝЈ¬НЁ№э¶ФPRәНPvҪшРРЖЧ·еЛСЛчАҙ№АјЖПа¶ФҫаАләНЛЩ¶ИЎЈ·еЦө¶ФУҰөДҫаАлУлЛЩ¶ИјҙҙэІвДҝұкөДЛЩ¶ИУлҫаАлРЕПўЈ¬ҝЙККУГУЪ¶аДҝұкіЎҫ°ЎЈ¶ФУЪ»щУЪMUSIC Лг·ЁКөПЦөДёРЦӘ№эіМЈ¬ЖдЖЧ·еЛСЛч№эіМЦРөДЛСЛчІҪіӨФҪРЎ№АјЖРФДЬФҪәГЎЈЧЫәПұҫҪЪДЪИЭЈ¬MUSIC Лг·ЁКөПЦІҪЦиИзЛг·Ё3 ЛщКҫЎЈ
Лг·Ё3MUSIC Лг·Ё
іхКј»ҜёРЦӘЧУФШІЁјҜKЈ¬ёРЦӘ·ыәЕјҜLЈ¬ёРЦӘДҝұкёцКэM
1) КдИлКХ·ўOFDM РЕәЕ¶ФУҰөД¶юО¬РЕәЕҫШХуЈ¬ҪшРРФӘЛШөгіэІЩЧчөГөҪ№ШУЪ¶аҙэІвДҝұкөДРЕөАРЕПўҫШХуTdivЈ»
2) »щУЪРЕөАРЕПўҫШХуTdiv№№ҪЁІвҫаРӯ·ҪІоҫШХу
3) ¶ФРӯ·ҪІоҫШХуRRҪшРРЖжТмЦө·ЦҪвЈ¬ІўАыУГРЎМШХчЦө¶ФУҰөДМШХчКёБҝ№№ҪЁФлЙщЧУҝХјдURЈ»
4) ёщҫЭ·ўЙдРЕәЕөДКұЖөҪб№№№№ҪЁЖөУтЦб¶ФУҰөДРЕәЕөјПтКёБҝARЈ»
5) ТФRЧчОӘЛСЛчұдБҝЈ¬¶ФPRҪшРР·еЦөЛСЛчЈ¬»сөГMёц·еЦө
6) Кдіц·еЦө¶ФУҰөДДҝұкҫаАлRm,m=1,Ўӯ,MЎЈ
АаЛЖөШЈ¬АыУГ¶аЖХАХПа№ШІвЛЩРӯ·ҪІоҫШХуRvУлөјПтКёБҝAvЈ¬НЁ№эЖЧ·еЛСЛчјҙҝЙ№АјЖёРЦӘДҝұкөДЛЩ¶ИЎЈ
3 РФДЬ·ЦОцј°ЧФККУҰёРЦӘЛг·ЁЙијЖ
ұҫҪЪКЧПИҙУёРЦӘҫ«¶ИЎўёРЦӘЧКФҙХјУГЗйҝцј°НЁРЕЛЩВКРФДЬ¶ФЙПКц3 ЦЦЛг·ЁҪшРР·ЦОцЈ¬И»әуұИҪП3 ЦЦЛг·ЁөДјЖЛгёҙФУ¶ИЎЈНЁ№э·ЦОцҝЙөГіцөҘ¶АК№УГЙПКц3 ЦЦЛг·ЁОЮ·ЁҙпөҪёРЦӘҫ«¶ИЎўНЁРЕЛЩВКј°ёРЦӘҙОКэөДЧоУЕЎЈЧоәуЙијЖТ»ЦЦЧФККУҰЛг·ЁЈ¬ёщҫЭҪУКХSINR ІвБҝЦөөДІ»Н¬Ј¬ЗР»»І»Н¬ёРЦӘЛг·ЁЈ¬ФЪХјУГНЁРЕЧКФҙКэІ»ұдөДЗйҝцПВЈ¬ҙпөҪёРЦӘҫ«¶ИөДМбЙэЎЈ
3.1 ёРЦӘҫ«¶ИЎўёРЦӘЧКФҙХјУГЗйҝцј°НЁРЕЛЩВКРФДЬ·ЦОц
КЧПИЈ¬¶Ф3 ЦЦёРЦӘЛг·ЁөДёРЦӘҫ«¶ИҪшРР·ЦОцЎЈёРЦӘҫ«¶ИРФДЬКЬПЮУЪҝЛАӯГАВЮҪзЈ¬ЧЬМеАҙЛөЈ¬УлёРЦӘЧКФҙёцКэЎўҪУКХSINR УР№ШЎЈ¶ЁТеҰГОӘҪУКХРЕәЕөДSINRЈ¬ёщҫЭОДПЧ[20,31-32]Ј¬ІЙУГ2D-DFT Лг·ЁөД№АјЖОуІоУләН¶юО¬АлЙўёөАпТ¶өгКэИЎЦөУР№ШЈ¬ІЙУГESPRITЎўMUSIC Лг·ЁөД№АјЖОуІоУләНРЕәЕҝХјдөДСЎФс·Ҫ·ЁУР№ШЎЈҪбәПОДПЧ[32]өД·ЦОцҪб№ыЈ¬Бо2D-DFTЎўESPRIT ј°MUSIC Лг·ЁФЪ№ШУЪҪУКХSINR КХБІКұөД№АјЖОуІо·ЦұрОӘEDFTЎўEESPәНEMUSЈ¬ВъЧг
ЖдҙОЈ¬ҙУёРЦӘЧКФҙХјУГЗйҝцј°НЁРЕЛЩВКРФДЬөДҪЗ¶И¶Ф3 ЦЦёРЦӘЛг·ЁҪшРР·ЦОцЎЈУЙУЪ2D-DFT Лг·Ё№АјЖОуІоУлУР№ШЈ¬ESPRIT ј°MUSIC Лг·Ё№АјЖОуІоУлУР№ШЈ¬ТтҙЛФЪҙпөҪПаН¬ёРЦӘҫ«¶ИКұЈ¬2D-DFT Лг·ЁөДЧоРЎҪУКХ SINR ұИ ESPRIT ј°MUSIC Лг·ЁёьөНЎЈБоҰГDFTЎўҰГESPЎўҰГMUS·ЦұрОӘ2D-DFTЎўESPRITЎўMUSIC Лг·ЁФЪіЙ№ҰёРЦӘДҝұкЗТ№АјЖОуІоПаН¬КұЛщРиЧоРЎҪУКХSINRЎЈёщҫЭОДПЧ[29]Ј¬ФЪХјУГПаН¬ёРЦӘЧКФҙөДЗйҝцПВЈ¬ОӘҙпөҪН¬Т»ҪПөН№АјЖОуІоЈ¬3 ЦЦЛг·ЁЛщРиөДЧоРЎҪУКХSINR ВъЧг
ұҫОДФЪНј2 әННј3 ЦР·ЦұрХ№КҫБЛ3 ЦЦЛг·ЁФЪІ»Н¬ҪУКХSINR ЗйҝцПВөДІвҫај°ІвЛЩҫщ·ҪёщОуІоЈЁRMSE,root mean square errorЈ©·ВХжҪб№ыЎЈУЙНј2әННј3 ҝЙјыЈ¬ОӘҙпөҪПаН¬RMSEЈ¬ЧоРЎҪУКХSINRФҪҙуЈ¬РиТӘХјУГУГУЪёРЦӘөДЧКФҙФҪ¶аЎЈјЩЙиПөНіЧЬЧКФҙКэПаН¬Ј¬К№УГ2D-DFT Лг·ЁКөПЦёРЦӘКұЈ¬ПөНіҝЙУГУЪНЁРЕөДЧКФҙЧо¶аЎўНЁРЕЛЩВКЧоёЯЈ¬ЖдҙОКЗESPRIT Лг·ЁЈ¬ЧоәуКЗMUSIC Лг·ЁЎЈАэИзЈ¬Нј3 ұнГчЈ¬ОӘҙпөҪ2 m Івҫаҫ«¶ИЈЁІвҫаҫщ·ҪёщОуІоОӘ102mЈ©Ј¬2D-DFTЎўESPRITЎўMUSIC Лг·ЁЛщРиөДЧоРЎҪУКХSINR·ЦұрОӘ-26 dBЎў-24 dBЎў-22 dBЎЈТтҙЛЈ¬ОӘҙпөҪПаН¬ёРЦӘҫ«¶ИРиЗуЈ¬ПаұИУЪ2D-DFT Лг·ЁЈ¬ESPRIT УлMUSIC Лг·ЁРиТӘ·ЦұрПыәД1.5 ұ¶ј°2.5 ұ¶ЧКФҙУГУЪёРЦӘЎЈјЩЙиПөНіІЙУГ2D-DFT Лг·ЁКұЧКФҙУГУЪёРЦӘЈ¬ЧКФҙУГУЪНЁРЕЈ¬ФтІЙУГESPRIT әНMUSIC Лг·ЁКұЈ¬НЁРЕЛЩВКҪ«·ЦұрјхРЎ25%ј°75%ЎЈ
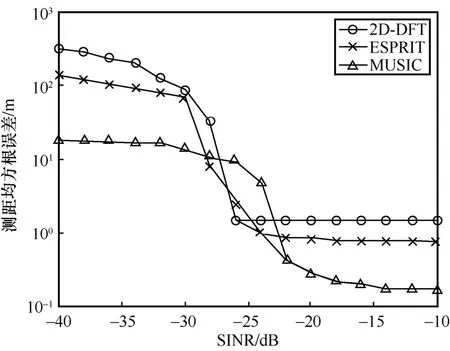
Нј2 3 ЦЦЛг·ЁҪУКХSINR УлІвҫаҫщ·ҪёщОуІоЦ®јдөД№ШПө
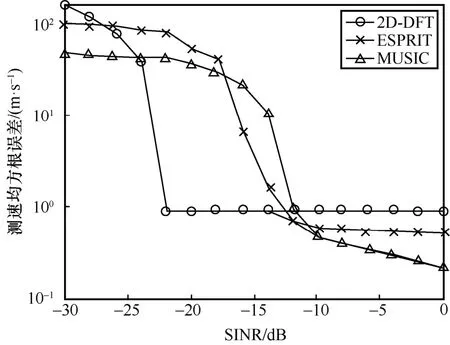
Нј3 3 ЦЦЛг·ЁҪУКХSINR УлІвЛЩҫщ·ҪёщОуІоЦ®јдөД№ШПө
ҙУЙПКц¶ФёРЦӘҫ«¶Иј°НЁРЕЛЩВКөД·ЦОцҝЙТФҝҙіцЈ¬ФЪЙПКц3 ЦЦЛг·ЁЦРЈ¬ҫЎ№Ь2D-DFT Лг·ЁёРЦӘҫ«¶ИЧоөНЈ¬ө«КЗЖдНЁРЕЛЩВКЧоёЯЈ»MUSIC Лг·ЁёРЦӘҫ«¶ИЧоёЯЈ¬ө«КЗЖдНЁРЕЛЩВКЧоөНЈ»ESPRIT Лг·ЁҫУУЪБҪХЯЦРјдЎЈ
3.2 јЖЛгёҙФУ¶И·ЦОц
ұҫҪЪ¶ФІ»Н¬Лг·ЁјЖЛгёҙФУ¶ИҪшРР·ЦОцЈ¬УГУЪ¶ЁБҝұИҪПІ»Н¬Лг·ЁАнВЫЙПҙҰАнКұСУөДҙуРЎЎЈұҫОДЛг·ЁёҙФУ¶ИөДУ°ПмТтЛШЦчТӘ°ьАЁҝмЛЩёөАпТ¶ұд»»ЈЁFFTЈ©әНДжұд»»№эіМЎўРӯ·ҪІоҫШХу№№Фм№эіМЎўЖжТмЦө·ЦҪв№эіМЎўМШХчЦө·ЦҪв№эіМЎўҫШХуЗуДж№эіМЎўҫШХуПаіЛ№эіМЎўОұЖЧ№№Фм№эіМТФј°ЖЧ·еЛСЛч№эіМөИЎЈЖдЦРЈ¬NөгҝмЛЩёөАпТ¶ұд»»ј°ЖдДжұд»»өДјЖЛгёҙФУ¶ИОӘҰҜ(NlogN)Ј¬јЩЙиПтБҝОӘnО¬Ј¬ҫШХуОӘnЎБnО¬·ҪХуЈ¬ФтПтБҝУлҫШХуПаіЛөДјЖЛгёҙФУ¶ИОӘҰҜ(n2)Ј¬ҫШХуіЛ·ЁөДКұјдёҙФУ¶ИОӘҰҜ(n3)ЎЈРӯ·ҪІоҫШХу№№Фм№эіМЙжј°Т»ҙОҫШХуіЛ·ЁФтЖдјЖЛгёҙФУ¶ИН¬СщОӘҰҜ(n3)Ј»ЖжТмЦө·ЦҪв№эіМ°ьАЁ2 ҙОҫШХуіЛ·ЁәН2 ҙОМШХчЦө·ЦҪвЈ¬ЖдЦРМШХчЦө·ЦҪвөДёҙФУ¶ИОӘ 2ҰҜ(n3)Ј¬ЧЬөДјЖЛгёҙФУ¶ИОӘ 6ҰҜ(n3)Ј»ҫШХуЗуДжөДјЖЛгёҙФУ¶ИУлҫШХуіЛ·ЁёҙФУ¶ИПаН¬Ј¬ОӘҰҜ(n3)Ј»¶ФУЪNөгІЙСщөДЖөЖЧЈ¬ЖдЖЧ·еЛСЛчөДёҙФУ¶ИОӘҰҜ(logN)Ј¬¶ФУЪMUSIC Лг·ЁЈ¬ЖдГҝҙОЖЧәҜКэөД№№Фм¶јКЗТ»ҙОПтБҝУлҫШХуПаіЛФЩіЛТФПтБҝөД№эіМЈ¬ЖдјЖЛгёҙФУ¶ИҝЙТФКУОӘ2 ҙОПтБҝУлҫШХуПаіЛЈ¬ОӘ2O(n2)ЎЈ3 ЦЦЛг·ЁөДјЖЛгёҙФУ¶ИИзұн1 ЛщКҫЎЈ

ұн1 3 ЦЦЛг·ЁөДјЖЛгёҙФУ¶И¶ФұИ
ТФұн2 ОӘ·ВХжІОКэөД6G ёЯЖөНЁРЕёРЦӘТ»Ме»ҜПөНіОӘАэЈ¬өұПөНіҝмЛЩёөАпТ¶ұд»»өгКэОӘ4 096 КұЈ¬ёҙФУ¶И·ЦОцІОКэN= 4096Ј¬n=132Ј¬M= 4 096ЎЈҙУұн1 ҝЙТФҝҙіцЈ¬2D-DFT Лг·ЁёҙФУ¶ИЧоөНЈ¬ЖдҙООӘESPRIT Лг·ЁЈ¬MUSIC Лг·ЁёҙФУ¶ИЧоёЯЎЈТтҙЛЈ¬ҫЎ№ЬёРЦӘҫ«¶ИЧоөНЈ¬ФЪПаН¬ёРЦӘКұјдДЪЈ¬2D-DFT Лг·ЁёРЦӘҙОКэЧо¶аЈ¬ЖдҙООӘESPRIT Лг·ЁЈ¬MUSIC Лг·ЁЧоЙЩЎЈ

ұн2 БҙВ·ј¶·ВХжІОКэј°ЕдЦГ
3.3 ЧФККУҰёРЦӘЛг·ЁЙијЖ
ҙУЙПКц·ЦОцҝЙЦӘЈ¬ёРЦӘҫ«¶ИҪПөНөДЛг·ЁҫЯУРёьёЯөДНЁРЕЛЩВКј°ёьөНөДјЖЛгёҙФУ¶ИЎЈөҘ¶АК№УГЙПКц3 ЦЦЛг·ЁҫщОЮ·ЁөГөҪёРЦӘҫ«¶ИЎўНЁРЕЛЩВКј°ёРЦӘҙОКэөДЧоУЕЎЈТтҙЛЈ¬УРұШТӘЙијЖТ»ЦЦЧФККУҰёРЦӘЛг·ЁЈ¬ёщҫЭІ»Н¬ҪУКХSINR СЎФсәПККөДЛг·ЁКөПЦёРЦӘЈ¬ФЪПаН¬НЁРЕЛЩВКөДЗйҝцПВЈ¬ҙпөҪёРЦӘҫ«¶ИөДЧоҙу»ҜЎЈ
ЧФККУҰёРЦӘЛг·ЁҫЯМеІЩЧчІҪЦиИзПВЎЈКЧПИЈ¬»щХҫПт»·ҫіЦР·ўЙдёРЦӘІОҝјРЕәЕЈ¬ІОҝјРЕәЕұ»ёРЦӘДҝұк·ҙЙдәуРОіЙ»ШІЁұ»»щХҫҙҰөДёРЦӘҪУКХ»ъҪУКХЎЈИ»ә󣬻щХҫ¶Ф»ШІЁРЕәЕөДҪУКХSINR ҪшРРІвБҝЈ¬ёщҫЭІ»Н¬SINR өДИЎЦөҙУ2D-FFTЎўMUSIC ј°ESPRITЦРСЎФсТ»ёцәПККөДЛг·ЁЈ¬К№ПөНіөДёРЦӘҫ«¶ИЧоёЯЎЈ
ёщҫЭКҪ(37)ЦР3 ЦЦёРЦӘЛг·ЁФЪҙпөҪҪПөН№АјЖОуІоКұЧоРЎҪУКХSINR өД№ШПөЈ¬¶ЁТеҰИ0ЈјҰИ1ЈјҰИ2ЈјҰИ3ОӘёРЦӘЛг·ЁөДЗР»»гРЦөЈ¬ҝЙУЙПИСй·ВХж»тХЯПөНіКөјКІвКФөГөҪЎЈТФЧоРЎ»ҜёРЦӘІОКэЧоРЎҫщ·ҪОуІоОӘДҝұкЈ¬ёщҫЭНј2 ЛщКҫөД·ВХжҪб№ыЈ¬ЧФККУҰёРЦӘЛг·ЁФЪІ»Н¬SINR ЗйҝцПВөДСЎФсЧјФтИзПВЎЈ
1) өұҰГЈјҰИ0КұЈ¬ёРЦӘЛг·ЁОуІоҙуЈ¬ёРЦӘК§°ЬЈ¬Д¬ИПІЙУГ2D-DFT Лг·ЁІвҫаЈ»
2) өұҰИ0ЎЬҰГЈјҰИ1КұЈ¬ІЙУГ2D-DFT Лг·ЁІвҫаЈ»
3) өұҰИ1ЎЬҰГЈјҰИ2КұЈ¬ІЙУГESPRIT Лг·ЁІвҫаЈ»
4) өұҰГЎЭҰИ2КұЈ¬ІЙУГMUSIC Лг·ЁІвҫаЎЈ
Хл¶ФДҝұкІвЛЩОКМвөДЧФККУҰёРЦӘЛг·ЁУлІвҫаПаЛЖЎЈЧЫәПұҫҪЪДЪИЭЈ¬ЧФККУҰёРЦӘЛг·ЁИзЛг·Ё4 ЛщКҫЎЈ
Лг·Ё4ЧФККУҰёРЦӘЛг·Ё
іхКј»ҜёРЦӘЧУФШІЁјҜKЈ¬ёРЦӘ·ыәЕјҜLЈ¬ёРЦӘДҝұкёцКэMЈ¬Лг·ЁЗР»»гРЦөҰИ0ЎўҰИ1ЎўҰИ2ЎўҰИ3
4 ·ВХжҪб№ы
ОӘјхЙЩ/ұЬГв¶Ф6G НЁРЕ»щұҫБҙВ·әНРФДЬөДУ°ПмЈ¬ұҫОДҝјВЗАыУГНЁРЕіЈУГөДOFDM РЕәЕҪшРРНЁРЕТөОсҙ«КдТФј°¶ФОҙЦӘДҝұкөДІОКэ№АјЖЎЈФЪОҙЦӘДҝұкІОКэ№АјЖ№эіМЦРЈ¬ОӘЖА№А2D-DFTЎўESPRITЎўMUSIC ј°ЧФККУҰёРЦӘЛг·ЁФЪКөјКТЖ¶ҜНЁРЕПөНіПВөДёРЦӘРФДЬЈ¬ұҫҪЪ»щУЪКұ·ЦЛ«№ӨЈЁTDD,time division duplexingЈ©ТЖ¶ҜНЁРЕПөНіТФј°әк·дОСЈЁUMAЈ©УҰУГіЎҫ°Х№ҝӘЈ¬ІЙУГОпАнПВРР№ІПнРЕөАЈЁPDSCH,physical downlink shared channelЈ©ҪшРРБҙВ·ј¶·ВХжЖА№АЈ¬РЕөАДЈРНОӘҙШСУКұПЯДЈРНЈЁCDL,clustered delay lineЈ©ЎЈ·ВХжІОКэИзұн2 ЛщКҫЈ¬НЁРЕёРЦӘТ»Ме»Ҝ№ӨЧчЖө¶ООӘ26 GHzЈ¬ҙшҝн100 MHzЈ¬МҪІвДҝұкҫаАлОӘ300 mЈ¬МҪІвДҝұкЛЩ¶ИОӘ20 m/sЎЈ·ВХж№эіМЦРІЙУГҪвөчІОҝјРЕәЕЈЁDMRS,demodulation reference signalЈ©ЧчОӘёРЦӘөјЖөЈ¬ҝЙФЪІ»У°ПмНЁРЕНМНВөДЗ°МбПВКөПЦДҝұкёРЦӘЈ¬НЁРЕКэҫЭәНёРЦӘөјЖөУіЙд·ҪКҪИзНј4 ЛщКҫЎЈ
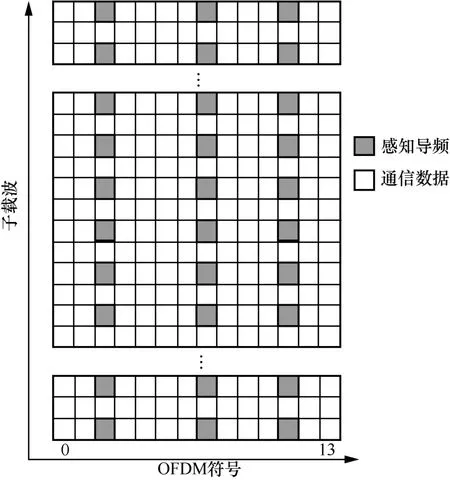
Нј4 PDSCH ЦРНЁРЕКэҫЭәНёРЦӘөјЖөУіЙд·ҪКҪ
БҙВ·ј¶·ВХжРФДЬЖА№АөДЦчТӘЖАјЫЦёұк°ьАЁІвҫаҫ«¶ИәНІвЛЩҫ«¶ИЈ¬НЁ№э500 ҙОГЙМШҝЁВЮ·ВХж»сөГЎЈёРЦӘҫ«¶ИУЙІОКэ№АјЖЦөУлХжКөЦөөДЧоРЎҫщ·ҪёщОуІоҝМ»ӯЎЈБоҙэ№АІОКэІвБҝҙОКэОӘNsampЈ¬ҙэ№АІОКэХжКөЦөОӘҰИЈ¬өЪiҙО№АјЖЦөОӘЈ¬RMSE јЖЛгКҪОӘЎЈ
Нј5 ¶ФұИ·ЦОцБЛ4 ЦЦЛг·ЁөДІвҫаРФДЬЎЈҙУНј5ЦРҝЙТФҝҙіцЈ¬4 ЦЦЛг·ЁөДІвҫаҫ«¶ИФЪІ»Н¬SINR ПВіКПЦІоТмРФЎЈөұҪУКХSINRЈј-26 dB КұЈ¬4 ЦЦЛг·ЁІвҫаОуІоҪПҙуЈ¬ҙЛКұёРЦӘК§°ЬЎЈөұҪУКХSINRЎЭ-26 dB КұЈ¬ЛжЧЕSINR өДФцјУЈ¬4 ЦЦёРЦӘЛг·ЁёРЦӘҫ«¶ИЦрҪҘҪөөНЎЈөұёРЦӘҫ«¶ИКХБІәуЈ¬2D-DFTЎўESPRITЎўMUSIC Лг·ЁІвҫаҫ«¶И·ЦұрОӘ1.45 mЎў0.76 mЎў0.17 mЎЈөұҙпөҪ1 m Івҫаҫ«¶ИЈЁІвҫаҫщ·ҪёщОуІоОӘ101mЈ©КұЈ¬ESPRITәНMUSICЛг·ЁөДҪУКХSINR·ЦұрОӘ-24 dBәН-22 dBЎЈПаұИЙПКц3 ЦЦЛг·ЁЈ¬ФЪёРЦӘіЙ№ҰөДЗйҝцПВЈЁҪУКХSINRЎЭ-26 dBЈ©Ј¬ЧФККУҰёРЦӘЛг·ЁөД№АјЖОуІоЗъПЯІ»ёЯУЪЖдЛыИОТ»ёРЦӘЛг·ЁОуІоЗъПЯЈ¬ұнГчЖдІвҫаҫ«¶ИОӘ4 ЦЦЛг·ЁЦРөДЧоУЕЎЈ
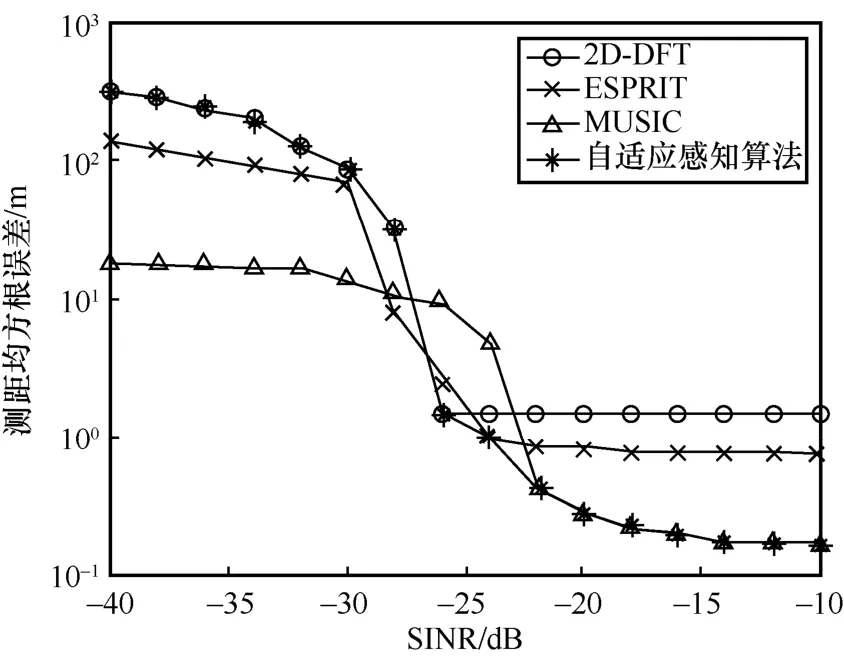
Нј5 4 ЦЦЛг·ЁҪУКХSINR УлІвҫаҫщ·ҪёщОуІоЦ®јдөД№ШПө
Нј6 ¶ФұИ·ЦОцБЛ4 ЦЦЛг·ЁөДІвЛЩРФДЬЎЈөұҪУКХSINRЈј-22 dB КұЈ¬4 ЦЦЛг·ЁІвЛЩОуІоҪПҙуЈ¬ҙЛКұёРЦӘК§°ЬЎЈөұҪУКХSINRЎЭ-22 dB КұЈ¬УлІвҫаҪб№ыАаЛЖЈ¬ЛжЧЕҪУКХSINR өДФцјУЈ¬4 ЦЦёРЦӘЛг·ЁІвЛЩҫ«¶ИЦрҪҘҪөөНЎЈөұІвЛЩҫ«¶ИҙпөҪ1 m/sЈЁІвЛЩҫщ·ҪёщОуІоОӘ101m/sЈ©КұЈ¬2D-DFTЎўESPRITЎўMUSICЛг·ЁҪУКХSINR ·ЦұрКЗ-22 dBЎў-13 dBЎў-12 dBЎЈЛг·ЁКХБІәуЈ¬2D-DFTЎўESPRIT Лг·ЁІвЛЩ№АјЖОуІо·ЦұрОӘ0.92 m/sЎў0.53 m/sЎЈУлЗ°БҪХЯІ»Н¬Ј¬MUSIC Лг·ЁЛжЧЕSINR өДМбЙэЈ¬ІвЛЩ№АјЖОуІоҝЙҪшТ»ІҪҪөөНЎЈПаұИЙПКц3 ЦЦЛг·ЁЈ¬ФЪёРЦӘіЙ№ҰөДЗйҝцПВЈ¬ЧФККУҰёРЦӘЛг·ЁІвЛЩ№АјЖОуІоЗъПЯІ»ёЯУЪЖдЛыИОТ»ёРЦӘЛг·ЁОуІоЗъПЯЈ¬ұнГчЖдІвЛЩҫ«¶ИУЕУЪЙПКц3 ЦЦЛг·ЁЎЈ
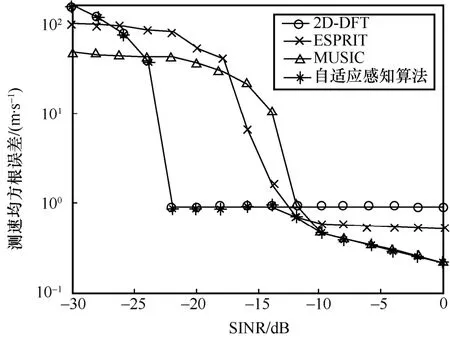
Нј6 4 ЦЦЛг·ЁҪУКХSINR УлІвЛЩҫщ·ҪёщОуІоЦ®јдөД№ШПө
Нј7 ГиКцБЛ4 ЦЦЛг·ЁФЪҙпөҪЖЪНыөДМҪІвҫ«¶ИЈЁ1 m Івҫаҫ«¶ИЎў1 m/s ІвЛЩҫ«¶ИЈ©КұЛщ¶ФУҰөДЧоҙуНЁРЕЛЩВКФцТжЎЈУЙУЪІ»Н¬ёРЦӘЛг·ЁФЪҙпөҪН¬Т»ёРЦӘҫ«¶ИКұ¶ФҪУКХSINR өДТӘЗуІ»Н¬Ј¬ПөНіРиТӘЕдЦГІ»Н¬КэБҝөДЧКФҙУГУЪёРЦӘЎЈФЪёРЦӘУлНЁРЕЧЬЧКФҙПаН¬өДЗйҝцПВЈ¬І»Н¬ёРЦӘЛг·Ё¶ФУҰөДНЁРЕЛЩВКІ»Н¬ЎЈФЪІвҫа·ҪГжЈ¬ЧФККУҰёРЦӘЛг·ЁУлESPRIT Лг·ЁКөПЦёРЦӘөДНЁРЕЛЩВКПаН¬Ј¬ЗТНЁРЕЛЩВКЧоёЯЎЈMUSIC Лг·ЁНЁРЕЛЩВКұИESPRIT Лг·ЁПВҪө60%ЎЈУЙУЪ2D-DFTЛг·ЁОЮ·ЁҙпөҪ1 m өДІвҫаҫ«¶ИЈ¬Йи¶ЁПөНі·ЦЕдЛщУРЧКФҙУГУЪёРЦӘЈ¬ТтҙЛНЁРЕЛЩВКОӘ0ЎЈФЪІвЛЩ·ҪГжЈ¬ЧФККУҰёРЦӘЛг·ЁУл2D-DFT Лг·ЁНЁРЕЛЩВКПаН¬Ј¬ESPRIT ҙОЦ®Ј¬MUSIC ЧоөНЎЈЧЫәПұИҪПІвҫаУлІвЛЩКұөДНЁРЕЛЩВКҝЙЦӘЈ¬ЛщМбіцөДЧФККУҰёРЦӘЛг·ЁөДЧоҙуНЁРЕЛЩВКФцТжУЕУЪЖдЛы3 ЦЦЛг·ЁЎЈ

Нј7 І»Н¬Лг·ЁФЪҙпөҪЖЪНыөДМҪІвҫ«¶ИКұөДЧоҙуНЁРЕЛЩВКФцТж
ОӘЖА№АЛг·ЁјЖЛгёҙФУ¶ИЈ¬ұн3 ҪшТ»ІҪ¶ФұИ·ЦОцБЛ3 ЦЦЛг·ЁөДФЛРРКұјдЎЈ·ВХж№эіМІЙУГ16 әЛIntel(R) Xeon(R) W-2245 CPU №ӨЧчХҫҪшРРФЛЛгЎЈТФНј5 ІвҫаРФДЬ·ЦОцОӘАэЈ¬2D-DFTЎўESPRITЎўMUSIC Хв3 ЦЦЛг·ЁөДФЛРРКұјд·ЦұрОӘ2.4 msЎў856.4 msЎў9 708.7 msЈ¬УлөЪ3 ҪЪАнВЫ·ЦОцҪбВЫТ»ЦВЎЈ¶ФұИЙПКцЛг·Ёј°ЧФККУҰёРЦӘЛг·ЁЈ¬ЧФККУҰёРЦӘЛг·ЁёҙФУ¶ИКјЦХІ»ёЯУЪMUSICЈ¬ЗТҪцФЪҪУКХSINRЎЭ-26 dBІвҫаЈЁ»тSINRЎЭ-12 dB ІвЛЩЈ©ј°ҪУКХSINRЎЭ-22 dBІвҫаЈЁ»тSINRЎЭ-10 dB ІвЛЩЈ©Кұ·ЦұрёЯУЪ2D-DFTј°ESPRITЎЈҪбәПНј3 әННј4 ҝЙЦӘЈ¬УЙУЪЧФККУҰЛг·ЁёРЦӘОуІоёьөНЈ¬ЖдҪПёЯөДјЖЛгёҙФУ¶ИКЗҝЙҪУКЬөДЎЈ
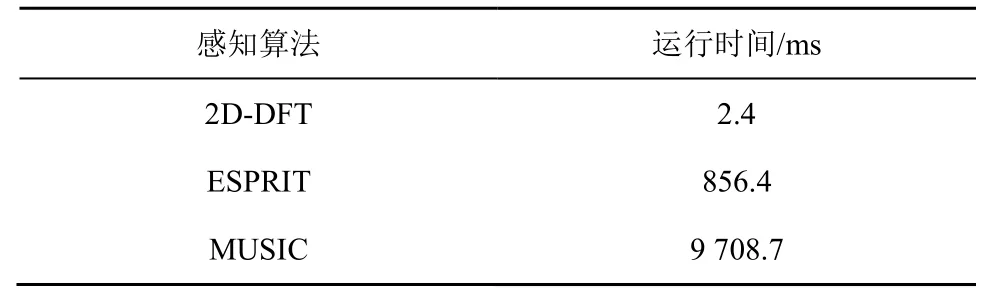
ұн3 І»Н¬ёРЦӘЛг·ЁФЪІвҫаКұөДФЛРРКұјд
ЧЫәПЙПКц·ЦОцҝЙЦӘЈ¬2D-DFT ҫЯУРЧоөНКХБІSINRЎўөНёҙФУ¶ИөДУЕКЖЈ¬ө«ЖдІвҫа»тІвЛЩҫ«¶ИКЬПЮЈ¬¶шESPRITЎўMUSIC ҝЙФЪҪПёЯSINR МхјюПВҙпөҪЖЪНыөДІвҫаәНІвЛЩҫ«¶ИРиЗуЈ¬ө«ЖдҙъјЫКЗҪПёЯөДјЖЛгёҙФУ¶ИЎЈТтҙЛЈ¬ГжПт6G ИЪәП¶аФӘ»ҜөДУҰУГіЎҫ°Ј¬ҝЙЧЫәПҫ«¶ИРиЗуЎўјЖЛгёҙФУ¶ИөИТтЛШБй»оСЎИЎ»тЗР»»І»Н¬ёРЦӘЛг·ЁЈ¬ВъЧгІ»Н¬УҰУГіЎҫ°ПВөДРиЗуЎЈАэИзЈ¬¶ФУЪҫ«¶ИТӘЗуІ»ёЯЈ¬»тёРЦӘКұСУГфёРЈ¬»тЙиұёҙҰАнДЬБҰКЬПЮөДіЎҫ°Ј¬ҝЙУЕПИІЙУГ2D-DFT Лг·ЁЎЈ¶ФУЪҫ«¶ИТӘЗуҪПёЯЈ¬»тёРЦӘКұСУІ»ГфёРЈ¬»тЙиұёҙҰАнДЬБҰҪПЗҝөДіЎҫ°Ј¬ҝЙҪшТ»ІҪҝјВЗESPRITЎўMUSIC Лг·ЁЎЈНЁ№эБй»оСЎИЎ»тЗР»»Лг·ЁЈ¬КөПЦёРЦӘРФДЬУлёҙФУ¶ИҪПәГөДХЫЦРЎЈ
5 ҪбКшУп
ұҫОДСРҫҝ»щУЪOFDM ІЁРОөДНЁРЕёРЦӘТ»Ме»ҜИЪәПЛг·ЁЙијЖј°УЕ»ҜЈ¬КЧПИёшіцБЛ»щУЪOFDM ІЁРОөДНЁРЕёРЦӘТ»Ме»ҜПөНіДЈРНЈ¬ҪйЙЬБЛ3 ЦЦҝЙКөПЦ¶аДҝұкІвҫаУлІвЛЩөДёРЦӘЛг·ЁЈ¬ІўҪшРРБЛПаУҰөДёРЦӘҫ«¶ИЎўёРЦӘЧКФҙХјУГЎўНЁРЕЛЩВКј°јЖЛгёҙФУ¶ИөД·ЦОцЈ¬ҝЙТФҝҙіцөҘ¶АК№УГИОТ»Лг·ЁҫщОЮ·ЁҙпөҪёРЦӘҫ«¶ИЎўНЁРЕЛЩВКј°ёРЦӘҙОКэөДЧоУЕЎЈ»щУЪЙПКц·ЦОцЈ¬ұҫОДМбіцБЛТ»ЦЦЧФККУҰёРЦӘЛг·ЁЈ¬ФЪКөјКПөНіЦРЈ¬ҪУКХ¶ЛНЁ№э¶ФҪУКХSINR өДІвБҝСЎФсәПККөДёРЦӘЛг·ЁКөПЦёРЦӘЈ¬ФЪНЁРЕЛЩВКІ»ұдөДЗйҝцПВЈ¬ҝЙКөПЦ¶ФёРЦӘҫ«¶ИөДМбёЯЎЈЧоәуЈ¬ұҫОДНЁ№эБҙВ·ј¶·ВХжСйЦӨБЛёРЦӘЛг·ЁөДёРЦӘҫ«¶Иј°јЖЛгёҙФУ¶ИЎЈЦөөГЧўТвөДКЗЈ¬іэПЦУРOFDM ІЁРОНвЈ¬6G НЁРЕёРЦӘТ»Ме»ҜПөНі»№ҝЙТэИлРВРНІЁРОКөПЦПөНіРФДЬөДМбЙэЎЈ»щУЪРВРНІЁРОјјКхөДёРЦӘУлНЁРЕРФДЬБӘәП·ЦОцј°·Ҫ°ёЙијЖҪ«ФЪОҙАҙөД№ӨЧчЦРСРҫҝЎЈ