ХӘТӘЈә НЁ№эКУЖөҪУҝЪәНChannel LinkРҫЖ¬КөПЦБЛКэЧЦРЕәЕҙҰАнРҫЖ¬TMS320DM642УлCamera LinkПЯЙЁГиПа»ъөДОЮ·мБ¬ҪУЎЈҪвҫцБЛНјПсКэҫЭКдіцЛЩ¶ИОӘ40 MB/sөДёЯЛЩНјПсКэҫЭІЙјҜПөНіЦРЈ¬З°¶ЛІЙјҜУләу¶ЛКдіцөДЛЩ¶ИЖҘЕдОКМвЎЈПөНіҝЙКөКұЎўёЯЛЩөШІЙјҜҙуБҝөДНјПсКэҫЭЎЈ
НјПсІЙјҜөДФЛУГ·ЗіЈ№г·әЈ¬ҫӯ№эјёК®ДкөД·ўХ№Ј¬ІЙјҜјјКхУРБЛәЬҙуіМ¶ИөДҪшІҪЎЈДҝЗ°өДЧЁТөІЙјҜЙиұёјҜіЙ¶ИёьёЯЈ¬·ЦұжВКёьҙуЈ¬ҙ«КдЛЩ¶ИёьҝмЈ¬Хл¶ФРФёьЗҝЎЈ
ұҫОДТФDALSA№«ЛҫөДSpyder2ПөБРПЯЙЁГиПа»ъОӘНјПсІЙјҜФҙЈ¬ТФTI№«ЛҫөДTMS320DM642¶аГҪМеҙҰАнЖчОӘәЛРДЈ¬КөПЦёЯЛЩНјПсөДІЙјҜәНҙҰАнИООсЎЈ
Spyder2ПЯЙЁГиПа»ъТФЖдёЯЛЩөДІЙјҜЛЩ¶ИәНПИҪшөДCamera LinkҪУҝЪЈ¬ТС№г·әУҰУГУЪ№ӨТөЙъІъПЯөИБмУтЎЈұҫ·Ҫ°ёјҜәПБЛCamera LinkәНTMS320DM642өДУЕөгЈ¬Лх¶МБЛЙијЖЦЬЖЪЈ¬ҪөөНБЛДС¶ИЈ¬МбёЯБЛЙијЖөДР§ВКәНЙијЖЦКБҝЎЈ
1ЎЎЧЬМеёЕКц
Camera Link КЗТ»ЦЦ»щУЪКУЖөУҰУГ·ўХ№¶шАҙөДНЁРЕҪУҝЪұкЧјЈ¬Camera LinkҪУҝЪІЙУГNational Semiconductor№«ЛҫөДChannel LinkјјКхЈ¬ЖдЧоёЯЛЩВКҝЙҙп2.38GbpsЎЈCamera LinkПа»ъәННјПсІЙјҜЙиұёЦ®јдІЙУГLVDSРЕәЕҙ«КдЈ¬ҙУ¶шјт»ҜБЛНјПсІЙјҜЙиұёәНДЈДвЙгПсН·Ц®јдЛщұШРиөДКУЖөұаҪвВлөИІҪЦиЈ¬ҪөөНБЛЙъІъіЙұҫәНО¬»Ө·СУГЎЈ
TMS320DM642ЧчОӘ¶аГҪМеҙҰАнЖчЈ¬ДЪЦГ3ёцЧЁУГөДКУЖөКэҫЭҪУҝЪЈЁVideo PortЈ©ЎЈГҝТ»КУЖөҪУҝЪУР20О»КэҫЭЧЬПЯЈ¬ҝЙТФФЪ8О»Ўў10О»Ўў16О»ЧЬПЯ·ҪКҪПВҪшРРКУЖөІЙјҜ»тКУЖөПФКҫЎЈІЙјҜЖөВКЧоёЯҝЙҙп80MHzЎЈ
DALSA Spyder2Па»ъІЙУГөҘНЁөАChannel LinkКдіцЈ¬ГҝПЯКдіц2048ПсЛШЈ¬ГҝёцПсЛШ8О»ЎЈОӘБЛНјПсҙҰАнөД·ҪұгЈ¬ІЙјҜҪУҝЪҪ«КУЖөКэҫЭЦШХыОӘНкХыЦЎІў»әҙжУЪSDRAMЦРЎЈTMS320DM642өДVideo PortҪУҝЪЙиЦГОӘ8О»өДRAW DataІЙјҜДЈКҪЎЈЧЬМеҪб№№ИзНј1ЛщКҫЎЈDALSA Spyder2Па»ъІЙјҜөҪөДКУЖөРЕәЕНЁ№эVideo Port 0ҙ«КдөҪSDRAMЦР»әҙжЈ¬DM642ФЩНЁ№эEMIFAҙУSDRAMЦР¶БИЎГҝЦЎНјПсҪшРР·ЦОцҙҰАнЎЈ
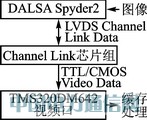
Нј1ЎЎЧЬМеҪб№№Нј
2ЎЎ№ШјьУІјюЙијЖ
2.1ЎЎКУЖөҪвҙ®өзВ·
Camera LinkұкЧјЦРЈ¬Па»ъөДРЕәЕұ»·ЦОӘ3ЦЦЈәКУЖөКэҫЭРЕәЕЎўПа»ъҝШЦЖРЕәЕЎўҙ®РРНЁРЕРЕәЕЎЈ
КУЖөҪвВлІҝ·ЦІЙУГNational Semiconducor№«ЛҫTSSOP56·вЧ°өДDS90CR288AҪУКХЖчАҙНкіЙЈ¬ЛьДЬ№»Ҫ«4В·LVDSҙ®РРКэҫЭБчЧӘ»»ОӘ2О»ІўРРTTL/CMOSКэҫЭЈ¬ФЪҙ«КдКұЦУCLKөДГҝёцЦЬЖЪЈ¬Ҫ«28О»ІўРРКэҫЭКдіцЎЈ
DS90CR288AҪвВліцөДTTL/CMOSРЕәЕҝЙТФ·ЦіЙ2АаЈәНјПсРЕәЕәННјПсКұЦУРЕәЕЈЁWCLKЈ©ЎЈЖдЦРНјПсРЕәЕУЦУЙ24О»НјПсКэҫЭРЕәЕәН4О»НјПсН¬ІҪРЕәЕЧйіЙЈ¬ХвР©РЕәЕ¶ј·ыәПChannel LinkјјКхұкЧјЎЈ
НјПсН¬ІҪРЕәЕ°ьАЁЈәFVALЈЁFrame ValidЈ©ЎўLVALЈЁLine ValidЈ©ЎўDVALЈЁData ValidЈ©Ј¬·ЦұрОӘЦЎУРР§РЕәЕЎўРРУРР§РЕәЕәНКэҫЭУРР§РЕәЕЎЈөұFVALЎўLVALЎўDVALН¬КұУРР§ЈЁОӘёЯөзЖҪКұЈ©Ј¬ұнКҫПа»ъХэФЪКдіцУРР§өДНјПсКэҫЭЎЈChannel LinkөДНјПсН¬ІҪРЕәЕәНКұЦУРЕәЕөД№ШПөИзНј2ЛщКҫЎЈ
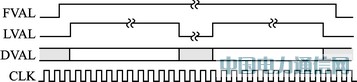
Нј2ЎЎКУЖөН¬ІҪРЕәЕКұРтНј
DALSA Spyder2 Па»ъОӘПЯЙЁГиКэЧЦЙгПс»ъЈ¬ЙиЦГОӘ8О»»Т¶ИКдіцЈ¬Па»ъФЪГҝёцКұЦУөДЙПЙэСШҙ«ЛНҙ®РРНјПсРЕәЕЈ¬FVALЎўDVALРЕәЕі§ЙМ№М¶ЁОӘёЯөзЖҪЈ¬Ц»УЙLVALРЕәЕҝШЦЖПа»ъөДНјПсКдіцЎЈХл¶ФХвТ»МШРФЈ¬ЙијЖід·ЦАыУГTMS320DM642өДКУЖөҪУҝЪХвТ»УЕКЖЈ¬УЙНјПсКұЦУЈЁWCLKЈ©АҙҝШЦЖКУЖөҝЪөДІЙјҜКұЦУЈЁVP0_CLK0Ј©Ј¬Па»ъөДРРУРР§РЕәЕЈЁLVALЈ©ҝШЦЖКУЖөҝЪөДІЙјҜК№ДЬ¶ЛЈЁVP0_CTL0Ј©Ј¬НјПсРЕәЕD[7..0]ЛННщVideo PortөДКэҫЭЧЬПЯVP0D[9..2]ЎЈІЙјҜҪУҝЪУлTMS320DM642өДКУЖөҝЪБ¬ҪУФӯАнНјИзНј3ЛщКҫЎЈ

Нј3ЎЎCameraУлTMS320DM642ҪУҝЪКҫТвНј
өұПа»ъКдіцТ»РРУРР§НјПсКэҫЭКұЈ¬TMS320DM642өДКУЖөҝЪФЪНјПсКұЦУөДЙПЙэСШҪ«Ҫвҙ®өДНјПсРЕәЕІЙјҜөҪКУЖөҝЪөДДЪІҝёЯЛЩFIFOЦРЎЈөұДЪІҝFIFO»әҙжі¬№эұаіМГЕПЮЈЁthresholdЈ©әуҪ«ЧФ¶ҜҙҘ·ўТ»ёцЧЁУГEMDAНЁөАҪ«FIFOЦРөДНјПсКэҫЭ°бТЖөҪSDRAMЦРЎЈХыёцКУЖөөДІЙјҜ№эіМ¶јГ»УРDSPёЙФӨЈ¬ұЬГвБЛУЙУЪКэҫЭ°бФЛ¶шТэ·ўөДҙнОуН¬КұјхЙЩБЛКэҫЭҙ«КдөДПөНіЧКФҙҝӘПъЎЈ
2.2ЎЎПа»ъҝШЦЖөзВ·
Camera LinkұкЧјЦР№ж¶ЁБЛ4О»Па»ъҝШЦЖРЕәЕЈәCC1ЎўCC2ЎўCC3әНCC4Ј¬РиТӘТ»ёц4О»өДLVDSЗэ¶ҜЖчЈ¬DALSA Spyder2 Па»ъЧсСӯCamera LinkұкЧјІЙУГБЛCC1ЎўCC2ЎўCC3ИэёцПа»ъҝШЦЖО»Ј¬·ЦұрНкіЙНвІҝН¬ІҪҝШЦЖЎўПсЛШЦШЦГҝШЦЖәНІЙјҜ·ҪПтҝШЦЖЈ¬CC4ҝШЦЖО»ФЭКұПРЦГЎЈІЙУГNational Semiconducor№«ЛҫөДDS90LV047AРҫЖ¬АҙЗэ¶ҜХв4О»Па»ъҝШЦЖРЕәЕЈ¬ИзНј4ЛщКҫЎЈ

Нј4ЎЎПа»ъҝШЦЖөзВ·КҫТвНј
DS90LV047AҪ«CPLD·ўЛН№эАҙөДНвІҝҝШЦЖРЕәЕЧӘ»ҜОӘ·ыәПLVDSұкЧјөДҝШЦЖРЕәЕЎЈПа»ъҝШЦЖРЕәЕөДК№УГКЗҝЙСЎФсөДЈ¬ПсDALSA Spyder2ПөБРЈ¬Г»УРҝШЦЖРЕәЕөДІОУлТІДЬНкіЙІЙјҜЎЈ
2.3ЎЎПа»ъНЁРЕөзВ·
DALSA Spyder2Па»ъРиТӘТ»ЧйУЙ9600bpsЎўТ»ёцҝӘКјО»ЎўТ»ёцҪбКшО»ЎўОЮРЈСйО»ЧйіЙөДҙ®РРТмІҪРЕәЕЈЁ±SerTFGЎў±SerTCЈ©АҙҪшРРПа»ъІОКэөДЙиЦГәНРЕПў·ҙАЎЎЈұҫЙијЖСЎУГБЛNational Semiconducor№«ЛҫөДDS90LV019јҜіЙЗэ¶ҜЖч/ҪУКХЖчАҙҪшРРTTL/LVDSЧӘ»»Ј¬ИзНј5ЛщКҫЎЈ

Нј5ЎЎПа»ъНЁРЕөзВ·КҫТвНј
DS90LV019УР4ЦЦ№ӨЧчДЈКҪЈ¬ДЈКҪөДСЎФсУЙDEәН/REБҪёцРЕәЕөДЧҙМ¬ҫц¶ЁЎЈөұDEәН/RE¶јОӘёЯКұЈ¬IC№ӨЧчФЪЗэ¶ҜДЈКҪЈ»өұDEәН/RE¶јОӘөНКұЈ¬IC№ӨЧчУЪҪУКХДЈКҪЈ»өұDEОӘөНЈ¬/REОӘёЯКұЈ¬IC№ӨЧчФЪИэМ¬ДЈКҪЈ»өұDEОӘёЯЈ¬/REОӘөНКұЈ¬IC№ӨЧчФЪИ«Л«№ӨДЈКҪЎЈХвАпІЙУГТ»Ж¬DS90LV019ЧчОӘҙ®РРНЁРЕLVDSРЕәЕөДКХ·ўЖчЈ¬№ӨЧчУЪИ«Л«№ӨДЈКҪЎЈФЩУГMaxim№«ЛҫөДMAX3221АҙҪшРРTTL/RS232өзЖҪјдөДЧӘ»»ЎЈҝШЦЖ¶ЛНЁ№эRS232ҪУҝЪ·ўЛНөДПа»ъГьБоФЩНЁ№эDS90LV019ҙ«ЛНёшПа»ъЈ¬Па»ъҪУКХәуёшіцөД·ҙАЎРЕПўФЩНЁ№эDS90LV019әНMAX3221ҙ«ЛНёшҝШЦЖ¶ЛЎЈ
3ЎЎИнјюЙијЖ
DDKКЗTI№«ЛҫУГАҙјт»ҜЙиұёЗэ¶ҜіМРтҝӘ·ўөДИнјюМЧјюЈ¬ЛьМṩБЛТ»Р©НвЙиөДНкИ«Зэ¶ҜәҜКэЈ¬ЖдЦРҫНУРVideo PortЧЁУГөДMinidriverЗэ¶ҜіМРтҝвЎЈ
КУЖөЗэ¶ҜіМРтЦчТӘ°ьАЁОўЗэ¶ҜЎўАаЗэ¶ҜәНЦРјдҪУҝЪ3ёц·ҪГжөДЙијЖЎЈКУЖөІЙјҜЗэ¶ҜіМРтЦРЈ¬ФЪGIOАаЗэ¶ҜіМРтөД»щҙЎЙПҪшТ»ІҪ·вЧ°іЙFVIDАаЎЈҪ«ОўЗэ¶ҜПё·ЦОӘКУЖө¶ЛҝЪАаәНЦЖ¶ЁөДұаҪвВлРҫЖ¬ОўЗэ¶ҜЈ¬БҪХЯЦ®јдНЁ№эНвІҝЙиұёҝШЦЖҪУҝЪEDCКөПЦ¶ФНвО§РҫЖ¬өДҙтҝӘЎўҝШЦЖәН№ШұХөИІЩЧчЎЈ
ОӘБЛКөПЦCamera LinkПа»ъНјПсКэҫЭөДІЙјҜЈ¬TMS320DM642өДКУЖөҝЪұШРлұ»ЕдЦГОӘRAW DATAІЙјҜ·ҪКҪЎЈУлНЁіЈөДBT.656ІЙјҜ·ҪКҪІ»Н¬Ј¬өұVideo Port№ӨЧчУЪRAW DATAІЙјҜ·ҪКҪПВЈ¬TMS320DM642І»»бҪшРРКэҫЭСЎФсәНКэҫЭЕР¶ПЈ¬¶шBT.656·ҪКҪРиТӘЕР¶ПSAV/EAVН¬ІҪВлЈ¬RAW DATAІЙјҜ·ҪКҪЦчТӘУГУЪҙУADC»сИЎФӯКјөДНјПсКэҫЭЎЈ
ФЪRAW DATAІЙјҜ·ҪКҪПВЈ¬өұCAPENРЕәЕЈЁVP0_CTL0Ј©ұ»К№ДЬКұЈ¬Video PortҝӘКјІЙјҜVP0DКэҫЭПЯЙПөДКэҫЭЈ¬ІЙСщКэҫЭөДҙуРЎҝЙТФНЁ№эVCxSTOP1өДVCXSTOPәНVCYSTOPО»ҪшРРЙиЦГЈ¬НЁ№эVCXSTOPәНVCYSTOPөДЧйәПЈ¬TMS320DM642ФКРнөҘЦЎЧо¶аІЙјҜ4096KbёцІЙСщКэҫЭЎЈөұІЙјҜКэҫЭҙпөҪVCXSTOPәНVCYSTOPЛщЙиЦГөДЦөөДКұәтЈ¬ІЙСщНкіЙЈ¬ҙЛәуЈ¬CAPENРЕәЕұШРлұЈіЦЦБЙЩ2ёцКұЦУЦЬЖЪөДОЮР§ЧҙМ¬ЎЈПөНіЦРЙиЦГІЙјҜЦЎҙуРЎОӘ2048pix×256pixЈ¬ј°ІЙјҜ524288ёцКэҫЭәуҙт°ьОӘТ»ЦЎЈ¬ПөНіІЙУГПа»ъөДКұЦУWCLK=25nsЈ¬РРУРР§ЦЬЖЪLVAL=50μsЈ¬РРОЮР§ЦЬЖЪОӘ150μsЈ¬150μs>>25nsЈ¬ДЬұЈЦӨCAPENЦБЙЩ2ёцКұЦУЦЬЖЪОЮР§ЧҙМ¬өДТӘЗуЎЈ
ЦЎН¬ІҪҙҰАн¶ФУЪRAW DATA·ҪКҪөДНјПсІЙјҜКЗТ»ёцәЬ№ШјьөДТтЛШЎЈУЙУЪRAW DATAІЙјҜ·ҪКҪөДКэҫЭІ»°ьә¬ИОәОАаЛЖУЪBT.656КэҫЭБчДЗСщөДЦЎЖф/НЈұкК¶ВлЈЁSAV/EAV CODEЈ©Ј¬ТІІ»МṩНвІҝөДЛ®ЖҪәНҙ№ЦұН¬ІҪРЕәЕЈ¬ЦЎН¬ІҪКұОЮ·ЁКөПЦөДЈ¬ЛщТФDDKЧФҙшөДMinidriverЗэ¶ҜіМРтОЮ·ЁНкіЙRAW DATA·ҪКҪөДНјПсІЙјҜЈ¬ФтРиТӘ¶ФMinidriverЗэ¶ҜҪшРРРЮёДАҙКөПЦRAW DATAІЙјҜЈ¬НЁ№эЙиЦГVideo PortөДөЪТ»іЎІЙСщҝӘКјјДҙжЖчVCxSTRT1Ј¬ІўФцјУІЙСщҙ№ЦұПыТюјдёфVCVBLNKPәНҝӘКјН¬ІҪК№ДЬО»SSEАҙјдҪУөДКөПЦЦЎН¬ІҪ№ҰДЬЎЈРЮёДәуөДКУЖөІЙјҜҪб№№ОӘЈә
typedef struct {
Int cmode;//ІЙјҜДЈКҪСЎФс
Int fldOp;//іЎ/ЦЎІЩЧч
/*8~15О»*/
Int scale;//1/2Лх·ЕК№ДЬ
Int resmpl;//»Т¶ИІЙјҜК№ДЬ
Int bpk10Bit;//10О»ІЙјҜДЈКҪ
/*16~23О»*/
Int hCtRst;//Л®ЖҪјЖКэёҙО»ДЈКҪ
Int vCtRst;//ҙ№ЦұјЖКэёҙО»ДЈКҪ
Int fldDect;
Int extCtl;//К№ДЬНвІҝКұЦУҝШЦЖ
Int fldInv;//К№ДЬіЎ·ҙЧӘ
/*ФӯКјДЈКҪІЙјҜІОКэ*/
Uint16 sse;//ҝӘКјН¬ІҪК№ДЬО»
Uint16 vcvblnkp;//ҙ№ЦұПыТюјдёф
Uint16 sse; //ҝӘКјН¬ІҪК№ДЬО»
Uint16 vcvblnkp; //ҙ№ЦұПыТюјдёф
Uint16 fldXStrt1; //іЎ1 XҝӘКј
Uint16 fldYStrt1; //іЎ1 YҝӘКј
Uint16 fldXStrt2; //іЎ2 XҝӘКј
Uint16 fldYStrt2; //іЎ2 YҝӘКј
Uint16 fldXStop1; //іЎ1 XНЈЦ№
Uint16 fldYStop1; //іЎ1 YНЈЦ№
Uint16 fldXStop2; //іЎ2 XНЈЦ№
Uint16 fldYStop2; //іЎ2 YНЈЦ№
Uint16 thrld;//КУЖөFIFOгРЦө
/*ЦЎ»әҙжЙи¶Ё*/
Int numFrmBufs; //»әҙжЦЎКэ
Int alignment;//ЦЎ»әҙж¶ФЖл·ҪКҪ
Int segId;//ҙжҙў·ЦЕдID
/*EDMAУЕПИөИј¶*/
Int edmaPri;//EDMAНЁөАУЕПИј¶
Int irqId;
} VPORTCAP_Params;
өұSSEО»ұ»ЦГО»ЗТКУЖөҝЪІЙСщК№ДЬРЕәЕУРР§Ј¬ФЪ2ёцҙ№ЦұПыТюјдёфТФәуЈ¬КУЖөҝЪҝӘКјІЙјҜКэҫЭЎЈНЁ№эЙиЦГVCVBLNKPО»Ј¬ҝЙТФ¶ЁТеТ»ёцҙ№ЦұПыТюРЕәЕКұјдөДіӨ¶ИЎЈОӘБЛұЈЦӨДЬФЪТ»ЦЎКэҫЭҝӘКјөДКұәтН¬ІҪЈ¬ПөНіҪ«VCVBLNKPЦГО»ОӘ0ЎЈ
ҙЛНвЈ¬ПөНіІЙУГөДКЗDS90CR288AПа»ъҪвВлРҫЖ¬Ј¬І»Н¬УЪDDKЦРК№УГөДSAA7121ҪвВлРҫЖ¬Ј¬ЛщТФФЪПа»ъөДҪУҝЪЕдЦГЦРЈЁVPORT_PortParamsЈ©РиТӘ¶ФEDCҪУҝЪҪшРРРЮёДЎЈ
DS90CR288AЦчТӘ°ьАЁҙтҝӘәН№ШұХБҪёцІЩЧчЈ¬ҝЙТФНЁ№э¶ФНвІҝCPLDЦРөДПа»ъҝШЦЖјДҙжЖчVIDEO_CLRЦГО»АҙІЩЧчЎЈРЮёДөГөҪөДEDCҝШЦЖәҜКэИзПВЈә
static EDC_Handle Camera_open(String devName, Arg optArg){
Int devId;
if(devName[0] != '/') {
devId = -1;//ОЮР§¶ЛҝЪ
} else if(devName[1] == '0') {
devId = 0;
VIDEO_CLR = 0x1Ј»//0әЕ¶ЛҝЪЈ¬јДҙжЖчЦГёЯЈ¬К№ДЬҪвВл
} else if(devName[1] == '1'){
devId = 1;
VIDEO_CLR = 0x1Ј»//1әЕ¶ЛҝЪЈ¬јДҙжЖчЦГёЯЈ¬К№ДЬҪвВл
} else {
devId = -1;//ОЮР§¶ЛҝЪ
}
return (EDC_Handle)devId;
}
static Int Camera_close(EDC_Handle handle){
VIDEO_CLR = 0x0Ј»//јДҙжЖчЦГөНЈ¬НЈЦ№ҪвВл
return EDC_SUCCESS;
}
4ЎЎҪбВЫ
ұҫЙијЖКөПЦБЛTMS320DM642НЁ№эVideo PortУлCamera LinkПа»ъөДОЮ·мБ¬ҪУЈ¬УІјюҪУҝЪЙијЖјтөҘЈ¬ПөНіұаіМТІәЬ·ҪұгЎЈХыёцНјПсөДІЙјҜ¶јІ»УГCPUөДІОУлЈ¬ҝЙТФМбёЯХыёцПөНіөД№ӨЧчР§ВКЎЈ
ІОҝјОДПЧ
[1] ФшТе·ј. DSPҝӘ·ўУҰУГјјКх[M].ұұҫ©әҪҝХәҪМмҙуС§іц°жЙз,2008.
[2] әъФҪАиЈ¬НхҝЎЈ¬ІЬјТчл.»щУЪTMS320C6711өДНјПсҙҰАнПөНіЙијЖ[D].ЙПәЈ:ЙПәЈҙуС§Ј¬ 2005.
[3] БхЗнЈ¬°ІМОЈ¬ҪрёХ. DM642+CPLDКУЖөІЙјҜҙҰАнПөНіЙијЖ[J]. ТЗЖчТЗұнУГ»§,2007(3).
[4] МАҪрҝнЈ¬ІЬөӨ»ӘЈ¬ОвФЈұу.УГDSPјјКхҙУДЈДвКУЖөРЕәЕЦР»сИЎКэЧЦНјПс[J].өҘЖ¬»ъУлЗ¶ИлКҪПөНіУҰУГ,2005(8).
[5] әъјОҝӯЈ¬ҪҜҪЁ№ъЈ¬ЖлГАұт.»щУЪTMS320DM642өДұаіМ[J].өзЧУІъЖ·КАҪз, 2006(4).
[6] ЕніМ.»щУЪTMS320C64x/DM64xөДКУЖөұаВлУЕ»Ҝ[OL].[201012].http://www.pcbfans.cn/article/e9/8263$3.html.
[7] ХФҪЁО°Ј¬ТьёЪ.»щУЪDM642өДКэЧЦНјПсІЙјҜРЎПөНі[D].әфәНәЖМШ:ДЪГЙ№Е№ӨТөҙуС§Ј¬ 2006.
[8] Texas Instruments.TMS320DM642 Video/Imaging FixedPoint Digital Signal Processor (SPRS200L),2007.
[9] Texas Instruments.TMS320C6000 DSP External Memory Interface(EMIF) Reference Guide(SPRU266A), 2003.
[10] Texas Instruments.Interfacing a CMOS Sensor to the TMS320DM642 Using Raw Capture Mode(SPRAA52), 2004.